While temperatures below freezing and the presence of ice will be among the first hazards that come to mind when considering an AUV expedition to the Polar Regions there are also a myriad of other hazards connected with the Polar Environment. But, just as important as the impact of the Polar Environment on AUV Operations is the reverse - the possible impact on the Environment of AUV and support operations. This section of the Guide provides some pointers based on experience for both.
The following topics are dealt with on separate pages accessed via the links below. The remainder of this page goes on to deal with what may broadly termed "Weather" - a major feature of the Polar Environment that invariably impacts directly AUV operations.
Ice
Gathering data from under ice - sea-ice of shelf ice - may well be the prime objective of an AUV mission such that avoiding ice entirely just is not possible. A separate page, from the link opposite, sets out some of the different type of ice that may be encountered, with the hazard posed to AUV operations and some ideas on mitigating risk. Read more on Ice Types ...
Operations from Ice Camps
AUV operations from ice camps can span a large range of logistics requirements. At the low logistics end, an ice camp might only be needed for some hours, for example to support a single-person portable AUV such as the 4kg ecoSUB deployed at an ice-covered lake, or into a coastal polynya, or seal breathing hole. All that might be needed were two people, a tent and survival equipment and provisions on a sled. In the most complex ice camps AUV operations may be just one activity. If situated 100s of km out in the Arctic ocean, setting up the camp may involve initial personnel flown in via an aircraft such as a Twin Otter, perhaps larger items via paradrops from C130 aircraft, or perhaps equipment and resupply visits from icebreakers, such as for the SHEBA ice camp. Read more on Operations from Ice Camps ...
Environmental Impact
Autonomous Underwater Vehicles and their operations have the potential to adversely affect the environment, both from the materials they contain and their emissions. The issues are primarily the same whether the AUV operations take place in the Arctic or the Antarctic. Because there is one structure for Environmental Impact Assessment (EIA) in the area of the Antarctic Treaty this Guide will focus on that structure, click on link opposite. Read more on Environmental Impact ...
National and International Law
Many aspects of national and international law that may be applicable to AUVs remain unclear. Papers frommaritime lawyers with title that include phrases, "Murky waters", "Enigmatic regime", "a new challenge for ocean governance" give a flavour of the current position. The Legal link opposite provides an outline relevant to AUV operations in all maritime domains before considering the very different detail for the Arctic and Antarctic. Read more on matters of National and International law ...
Weather
It is almost a certainty that weather conditions will affect polar AUV operations whether from an ice camp or from a ship. There is much background information available to assist in being prepared to face the challenges from poor weather in the Polar Regions. King and Turner (Antarctic Meteorology and Climatology, Cambridge University Press, 1997) is an excellent treatise for Antarctica and the Southern Ocean detailing the physics as well as providing climatological data such as expected wind speeds.
Volumes on Sailing Directions ("Pilots") from national hydrographic agencies contain a wealth of practical information on weather and climate, for example, the coverage map from the UK Hydrographic Office shows which Volume is applicable to which region; note that the single Volume 9 covers the Antarctic.
A useful work of reference on weather forecasts for Antarctic waters and coastal regions is the "International Antarctic Weather Forecasting Handbook". Comprehensive current forecasts, observations, past weather and satellite sea-ice charts for the circumpolar Southern Hemisphere are available via a portal at the Australian Bureau of Meteorology.
For the Arctic, the European Centre for Medium Range Weather Forecasting produces a small range of publicly available charts, others may well be accessible to registered researchers. The EU's Copernicus Marine Environment Monitoring Service (CMEMS) has an open access portal with selected sea ice products for the Arctic.
Low temperatures: Impact on people
Most important is the impact of low temperatures on people. A number of authoritative texts are available on managing and mitigating the risks involved in polar fieldwork. A recent document arising from a 2014 Workshop sponsored by the US National Science Foundation's Arctic Research Support and Logistics programme includes a salutary reminder that lives continue to be lost in polar fieldwork. Its findings of two consistent themes go beyond the effects of low temperatures are are consistent with the intent and purpose of this Guide, to paraphrase:
• Embed risk management fully within the culture of polar operations - ensure changes are not just cosmetic.
• Researchers and those that support research need improved systems to share information, particularly between experienced field personnel and early career personnel, to learn from the mistakes and successes of others.
As regards low temperatures, the report stresses that more than one hazard may be present, cold, remoteness, patchy communication, human error, exhaustion and bad weather may occur together and should not be treated as (vanishingly small through multiplication) statistically independent risks.
Practical advice is also widely available, one comprehensive set of guidelines being in the document "HSE guidelines for metocean and Arctic surveys" available free from the International Association of Oil and Gas Producers. Their Annex B1 is a Questionnaire to assess gaps and capabilities in safety management and its completion by groups contemplating Polar AUV operations would undoubtedly throw up areas that could be improved.
The recently established Arctic Safety Centre at the University Centre in Svalbard aims to deliver practical courses on safety in the Arctic.
Low temperatures: Impact on AUVs
The following is an initial list of specific AUV-related topics where low temperatures have caused problems:
Several effects on the vehicle's batteries
• Reduced energy capacity (kWh or MJ) at low temperatures is a well known problem with most primary and secondary battery chemistries. Prior modelling of energy consumption, battery characteristics and expected temperatures could well be useful. It would be especially important if there were periods of heavy power demand, as taking average power consumption would lead to av overestimate of energy available as losses generally go with current squared. Mitigation measures are possible, including considering chemistries with better low temperature performance, such as primary lithium metal or secondary lithium ion. Pre-heating packs before deployment and adding thermal insulation to help maintain an above-ambient temperature using the heat produced on discharge was an effective strategy for Autosub2's manganese alkaline batteries.
• Rapid charging of lithium ion batteries at low temperatures carries risks, it becomes possible for lithium metal dendrites to form resulting in internal short circuits. Certain lithium chemistries age faster at low temperatures.
Effects on sensors
Low temperatures, combined with spray and or residual water, can lead to ice forming where it could do damage or lead to wrong or inconsistent sensor readings. Certain sensors may have cavities where ice could form, e.g. conductivity cells, pumped sensors, water samplers, and the inlet to pressure sensors. While trapped ice would melt given time once the vehicle was deployed there are circumstances where errors could remain, e.g. if a "zero offset" value was taken at the surface for a pressure sensor with an ice plug and that value applied through the mission.
Effects on actuators
McPhail and others (2019) reported that the rudder on the Autosub Long Range, on its deployment under the Filchner Ice Shelf, became stuck for three and a half hours at the deepest pint into the cavity. At that point, the water temperature was within 0.03˚C of freezing for the in situ salinity. They could not rule out that fresher, surface water on deployment, which would freeze at a higher temperature because of the lower salinity, could have remained within cavities in the rudder actuator. No explanation was given of how the rudder actuator may have unfrozen.
Reduced visibility
• Fog is very common in the Arctic during the summer months, although rarer in the Antarctic (MacDonald, Polar Operations, US Naval Institute, 1969). Arctic summer advection fogs arise from warmer air moving over the cold ice, lowering the dew point.
• Sea-smoke, also known as steam fog, can occur over leads of open water at low temperatures, especially in winter, when light winds bring cold air over what has been still, moisture-saturated, warmer (no colder than -2˚) air in contact with the open water, leading to the moisture that cannot be held at the lower temperature forming a fog.
• Ice crystal haze can form from radiation cooling of moisture in the air at very low temperatures.
• Whiteout, caused by to-and-fro reflection between ice surfaces and cloud layers, can cause the horizon to disappear and the resulting shadowless light makes distance perception difficult, which may complicate finding an AUV on the surface on recovery.
Wind
High wind speeds are an obvious hazard to AUV operations. Given the propensity of the weather in Polar Regions to change quickly the wind speed may well be unexpectedly higher, and or from a different direction, at the time of recovery than at deployment. This may be especially so in a near shore environment subject to katabatic winds off ice slopes of Antarctica or Greenland. Such winds are particularly prevalent off the coast of Adelie Land and King George V Land, Antarctica, with their direction controlled by the local topography and characterised by sudden and unpredictable onset and cessation. No synoptic pressure chart will be of help in forecasting their occurrence.
In contrast, further offshore of Antarctica the general tendencies of the wind patterns are more predictable. In general, north of 60-65˚S strong westerlies dominate, from a succession of circumpolar low pressure areas with intermediate ridges of high pressure. South of that broad and variable boundary easterlies dominate, consistent with the extensive polar high pressure system over the continent itself caused by the cold temperatures and sinking of dense air.
The actual hazard from wind is most likely to occur during recovery. An AUV surfacing to a fixed location in an area prone to sea ice is certainly a risk. Far better is to have a homing system on the ship or ice camp and to have the vehicle in a sub-surface holding pattern until called by the homing system, having ensured adequate open water or, for a return to an ice camp with a catching system, that all is ready for recovery.
In high winds, even if the AUV surfaces in adequate open water, windage on a support ship may make a recovery difficult, small boat support would be too dangerous, and a recognised tactic if the recovery plan goes awry is to break off, reconsider and try again. AUVs with little reserve buoyancy and a low density surface layer are all too easily pushed under the keel or transome of a ship.
Low surface water density and density gradients
In an AUV without active buoyancy control there is a careful balance between sufficient buoyancy at the sea surface to float with sufficient freeboard for antennas etc. to be exposed but not too much buoyancy such that there is a large pitch-down attitude when submerged and underway leading to unwanted drag and sub-optimum angles for downward-looking sensors. Low surface densities are to be expected in regions of melting ice, especially in confined areas, e.g. small restricted fjords. While it is standard practice to take water samples to compute local density, e.g. from salinity and temperature, care needs to be taken that the water sample is truly representative of the undisturbed environment. This can be difficult from a ship, as the presence of the ship is likely to mix the upper few metres in its immediate vicinity. For example, on the Autosub2 East Greenland cruise, 2004, a bucket sample from the ship's side showed density varying from 1020.5 to 1024 kg/m3, but from undisturbed water ahead of the ship it was 1016.6kg/m3. Prior knowledge of the very surface density may be hard to obtain before the mission, therefore plans should be in place for how to cope with a wide range of surface density.
Polar Environment




Cold, snow and poor visibility: conditions were far from ideal to be working on the Autosub2 AUV on an open deck in the Northern Weddell Sea, 2001. Lessons learnt from this expedition led to proper heated containers for the vehicle and servicing on later expeditions. Image courtesy Mark Brandon.
Fog is very common in the Arctic in summer. Here, the RV Polarstern is moored to the edge of fast ice over Belgica Bank, NE Greenland at about 78˚ 40' N in August 2004. At this time, Autosub2 was underway under the fast ice on a 24-hour mission. Note: By 2019 the majority of the fast ice over Belgica Bank had broken up, a NASA image sequence catches the "last hours" during August-September 2019.
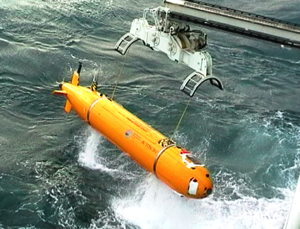
Persistent wind raises a local sea that can make AUV recovery hazardous. Here Autosub1 is being recovered in sea state 5-6, waves with a significant wave-height of 2-3 metres. The swinging is evident, but well-controlled due to the use of this purpose-designed gantry with two lifting points and relatively low to the water. Using a ship's crane with a single lifting point under these wind and wave conditions would likely lead to violent pendulum swings, difficult to control with hand lines.
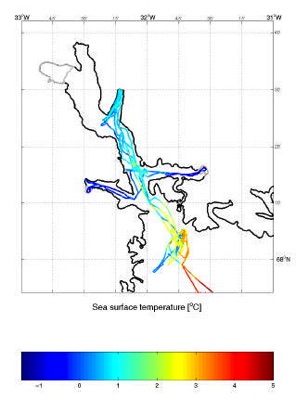
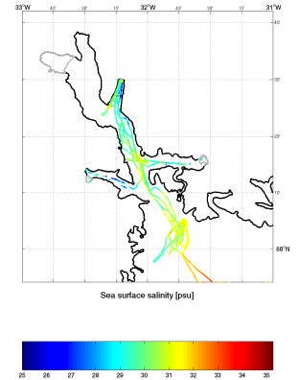
Strong horizontal spatial gradients (and vertical gradients, not shown) of temperature and salinity (hence density) in coastal polar environments can cause difficulties for AUVs without active buoyancy control. Care should be taken to obtain samples for density computation from the very surface of undisturbed water. These examples from Kangerdlugssuaq Fjord, East Greenland, during and Autosub2 expedition in 2004, from the Cruise Report.



Sea ice in the Northern Weddell Sea. Top, from USCGC Glacier in 1978, bottom, from RRS James Clark Ross in 2001.