Introduction and scope
Autonomous Underwater Vehicles and their operations have the potential to adversely affect the environment, both from the materials they contain and their emissions. The issues are primarily the same whether the AUV operations take place in the Arctic or the Antarctic. Because there is one structure for Environmental Impact Assessment (EIA) in the area of the Antarctic Treaty this Guide will focus on that structure, but deals separately with additional EIA issues likely to be found in the Arctic.
EIA south of 60˚S
Article 8 of the Environment Protocol of the Antarctic Treaty requires Environmental Impact Assessments to be conducted. There is a Guide available. The starting point is a straightforward question over whether the impact from the proposed activity is, from the result of a Preliminary Environmental Impact Assessment, less than, equal to, or more than minor or transitory.
What does a Preliminary Environmental Impact Assessment (PEA) comprise?
The PEA proforma from the British Antarctic Survey provides a good example of the information that is required at this first stage of an EIA. It captures a description of the project, the people involved, the location, and the duration and intensity of the activity. The potential impacts are teased out through a series of questions, including on the deployment of equipment. It has a specific note that, "If any of the equipment you deploy in the field or ocean is lost or cannot be retrieved as planned you will need to report this at the time of the incident on AINME [an online database] and to the Environment Office". There is a specific section on "Remotely Piloted Aircraft Systems or other automated marine or terrestrial vehicles". This section requires the names, training, qualifications and hours logged of the operators. The form also asks if specific vulnerable marine ecosystems sites are to be visited.
A substantial section follows to construct an Environmental Impact Matrix. When completed, the Matrix will list the Activities, the Possible Impacts and Mitigating Measures to be undertaken.
The completed PEA proforma is assessed by the institution's Environment Office and assigned a category: either project to proceed on the basis of the mitigating measures or to proceed to an Initial Environmental Evaluation.
Less than minor or transitory
If the likely impact is less than minor or transitory then the PEA suffices and the activity can go ahead without further assessment. Through a process of elimination it is clear that the vast majority of AUV activity in the Antarctic has either been undertaken with this level of EIA or has been embedded within larger programmes.
Minor or transitory - requiring an IEE
There are only two relevant projects listed in the Secretariat to the Antarctic Treaty's EIA database at the next level - Initial Environmental Evaluation (IEE) and none at the highest level - Comprehensive Environmental Evaluation resulting from a search with the keyword "Autonomous". The two projects at IEE are from Brazil using AUVs (Seagliders) and the series of investigations in Lake Bonney using the Endurance Hybrid AUV.
However, there are probably a number of larger projects or programmes with AUVs embedded that were not found with this simple keyword search. Two such programmes are the UK iSTAR Ice Shelf Stability programme and the 2019 International Weddell Sea Expedition. Both of these IEE examples contain only passing reference to the operation of AUVs:
iSTAR: In Table 6 AUVs (Autosub) are lumped with other "Ocean deployed equipment", the risk of loss is noted as are the acoustic emissions, with potential impacts of waste being left in the sea and the displacement of marine animals due to noise. These possible impacts are dealt with by a series of non-quantitative, common sense mitigation measures.
2019 Weddell Sea Expedition: This IEE was prepared by a New Zealand company, Consortia Consulting Ltd., that specialises in technical and policy advice to Antarctic operators and Governments. Section 7.4.2 is a substantial analysis on the potential noise, light and heat impacts from AUVs (and ROVs), the likelihood (estimated as 0.7% per hour) and consequence of drop-weights being jettisoned, the relative likelihood of loss "significantly less than 13 years ago [the loss of Autosub2 under the Fimbul Ice Shelf]", impact of loss, mitigation measures. The potential impact of generating water turbulence is noted, as is the potential for introducing non-native species. Despite this being a substantial analysis, there is no quantitative assessment of the acoustic emissions from the sonars on the AUVs.
More than minor or transitory - requiring a CEE
None known relevant to AUVs, examples include the construction of buildings and runways.
What are the possible impacts from AUV operations for an Impact Matrix?
While impacts may vary depending on the type of AUV and instruments carried, the following is a list of common AUV sub-systems with notes on potential impacts:
Command, Control and Mission Management
These modules, comprising hardware, software and sensors must demonstrably be able to reduce the risk of loss of the vehicle following one or more failure in these and other subsystems. For example, in the illustration opposite, Autosub6000 Command Control and Mission Management system caused the vehicle to rise to the surface when a water leak into a battery module caused a failure that could have seen the vehicle sink.
Communications
Electromagnetic radiation from VHF and UHF communications on an AUV on the surface is likely to be at the level of Watts, and should not pose an environmental risk.
Any acoustic communications installation is likely to have a Sound Power Level (SPL) that means a preliminary impact assessment should be documented. Typical SPLs are 180–190 dB re 1microPa at 1m, and transmissions could last tens of seconds. The standard reference on the risk posed to the Antarctic marine environment by acoustic emissions is the 2005 collective article by the Scientific Committee on Antarctic Research's group on the impacts of acoustic technology. Their risk matrix comprises six levels of impact, 1 being no impact and 2 being animals showing "short term (hours) behavioural change". Any greater impact than this suggests an IEE would be needed. The group use a seven-level likelihood scale from A, "expected in almost all instances" to F being "cannot see how it could happen". Unfortunately, acoustic communication modems were not specifically considered by the group, but the combination of SPL and duration places these modems at or below the Temporary Threshold Shift line in their Figure 1.
Modern acoustic communications modems can have their SPL set by the user; one mitigation response could be to undertake local tests of acoustic propagation and set the SPL to the minimum that would guarantee effective communication over the required range at the location of the mission.
Vehicle structure
The vehicle structure may well contain organic synthetic resins, e.g. as bonding agents, that are prescribed under EU Directive 76/464/EEC List I (Black List). There is a possibility that microplastics or microfibres could be shed into the water, especially after a collision involving damage to glass-fibre or carbon-fibre panels. On more than one occasion large AUVs have been sliced by the propellers of their support ships.
All electronic modules should conform with EU Directive 2002/95/EC using tin rather than lead/tin solder.
Any anti-fouling compounds used should conform to requirements in the operating region.
If the vehicle uses oil-filled, pressure compensated components the oil used should be chosen for minimal effect on the environment should there be a leak, commensurate with the properties needed for electrical safety and component longevity.
Energy and propulsion
It is quite likely that the energy system, whether batteries or fuel cell / semi-fuel cell, will contain substances included on the Grey List of EU Directive 76/464/EEC List II. Examples would be copper, boron (sodium borohydride fuel cells), vanadium, cobalt (within the cathodes of a wide range of lithium secondary cells), phosphorous (within lithium iron phosphate cells) and halides (such as lithium hexafluorophosphate, the ubiquitous salt within the organic liquid electrolytes in lithium ion secondary cells).
Navigation
The main environmental risk from the navigation system is through inadequate performance or errors or bugs in code leading to the AUV being lost. An AUV designed for long endurance may use magnetic heading sensor, as is the case with the Autosub Long Range used under the Filchner and Ronne Ice Shelves in 2018. Gliders invariably use magnetic heading sensors. McPhail and others have described the precautions needed to ensure sufficient accuracy with a magnetic sensor at high geomagnetic latitudes. Their procedures brought what would have been an uncorrected error of 35˚ to about 0.5˚.
Payloads and sensors
Acoustic emissions are likely to pose the greatest risks to the marine environment. As for communications modems, the SCAR working group article is an accepted reference. In this category the AUV may carry:
• Acoustic release, the combination of short, well separated pulses with an SPL generally less than 190 dB re 1microPa at 1m means that short term behavioural changes would only occur in exceptional circumstances (level E).
• Singe-beam echo sounder, the SCAR Working group example with a SPL of a 12 kHz echo sounder with a 232 dB re 1microPa at 1m SPL was considered to lead to short term behavioural changes in a few cases (level D). Given that single beam echo sounders, and analogous instruments such as scientific echo sounders at 38kHz and above for fisheries or zooplankton studies, and Acoustic Doppler instruments at 75kHz and above with SPLs likely to be lower than the 232 dB re 1microPa at 1m of a shipboard instrument would likely be at level D or even E.
• Multibeam echosounders on AUVs will likely operate at higher frequencies (100kHz and above) with shorter pulses, and shorter pulse intervals than their shipboard counterparts considered by the SCAR Working Group. The Kongsberg EM2000 sounder (now superseded by the EM2040 but there is no equivalent data) has an SPL of no more than 218dB re 1microPa at 1m, 18dB less than a shipboard system. Hence short term behavioural changes would only occur in some, or more likely a few, circumstances (levels C and D).
• Sub-bottom profiler, curiously the example considered by the SCAR Working Group had an SPL of 204dB re 1microPa at 1m whereas AUV sub-bottom profilers include examples at 235dB re 1microPa at 1m (Innomar SEE-200). Hence short term behavioural changes would only occur in some, or perhaps only a few, circumstances (levels C and D).
Mitigation methods may include procedures such as commanding the higher power acoustic instruments to begin operation to remain off on deployment until the immediate area had been noted as being clear of marine mammals.
Acoustic emissions from sonars such as the 38kHz and 120kHz Kongsberg EK500, whose transducers are near the nose of the AUV, and an RD Instruments 300kHz Doppler Velocity Log near the tail, need to be considered as part of a Preliminary Environmental Impact Assessment.
Environmental Impact and its Assessment



Emissions of prescribed substances can come from failed or damaged energy systems.
The aluminium hydrogen peroxide semi-fuel cell powering the Altex AUV is known to have suffered a failure due to overheating with the possible release into the environment of reactants.
On 9 July 2012, in open water, Autosub6000 surfaced automatically 20 minutes after launch, with 'smoke' coming from the vehicle and a 'slight slick' on the surface. On recovery, charred oil covered part of the forward compartment. Sea-water had entered one of the ~4kWh lithium polymer battery packs.
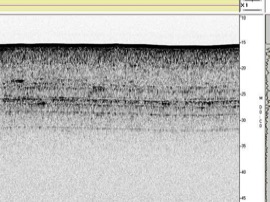
The preliminary analysis at left suggests that a low frequency (<7.5kHz) sub-bottom profiler with a SPL of the order of 235dB re 1microPa at 1m may be the sensor with the most significant effect on the marine environment.
It is the combination of low frequency (hence low attenuation), high power and wide beamwidth that makes this so. Nevertheless, short term behavioural changes would only likely occur in some, or perhaps only a few, circumstances.
This sub-bottom profiler record was taken by Autosub6000 over the Darwin Mounds on RRS James Cook cruise 60, 2011.
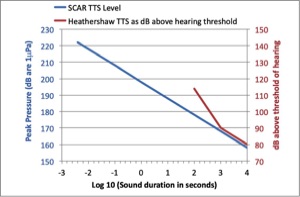
The relationship between peak sound pressure level, duration of the sound and the Temporary Threshold Shift at the heart of the article by the Scientific Committee on Antarctic Research's group on the impacts of acoustic technology is shown above in blue. The SCAR group sourced this graph from Finneran et al. (2002).
While the SCAR group article is widely accepted, there may be times when a more detailed evaluation may need to be done. Shown on the graph above in red is the TTS from Heathershaw et al. (Heathershaw, A.D., Ward, P.D. and David, A.M., 2001. The environmental impact of underwater sound. Proceedings-Institute of Acoustics, 23(4), pp.1-12.) where TTS is expressed as dB above the threshold of hearing. Heathershaw et al. also presented a range of curves for the hearing threshold as a function of frequency for a range of marine animals. They especially noted the more sensitive hearing of toothed whales, such as the sperm whale, southern bottlenose whale and southern four-tooth whale in the Antarctic and the narwhal, beluga and pilot whales in the Arctic.
Given the importance of toothed whales, such as the beluga, to Arctic First Nation communities it would be incumbent on AUV operators to undertake species-specific TTS estimates in such cases.
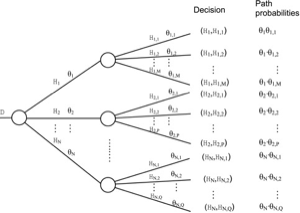
The IEE prepared for the 2019 Weddell Sea Expedition included an estimate of the probability of the need to jettison a drop-weight. Such probabilities can be estimated using combinatorial event trees such as the example above from Brito et al. (2014). The event (e.g. weight-drop, loss) is the final consequence (d), at left, of precursor events, here shown with two levels. The probabilities of the root cause event may be known, or they may be estimated using formal expert judgement.
