

1972
R. Francois, University of Washington: Unmanned Arctic Research Submersible (UARS). Detailed technical information is available in a report by S.R. Murphy (1972).
1992
J. H. Morison and R. Light, University of Washington: Autonomous Conductivity-Temperature Vehicle (ACTV). A redesigned and reconfigured Mk. 38 US Navy sonar target vehicle was used to measure convection under leads and sea ice in the Beaufort Sea about 300km north of Deadhorse, Alaska. The ACTV was fitted with an acoustic homing system for its deployment during the LEADEX experiment.
1993-6
J. Osse and R. Light, University of Washington, B. Sotirin, Space and Naval Warfare Systems Center (US manager and Chief Scientist): Support for the $35M joint Canada-USA Spinnaker project. The Autonomous Line Deployment Vehicle (ALDV) was used at an ice camp (Camp Zed or Zee) some 180km from Alert, Ellesmere Island to support the deployment of a 2400m long bottom-mounted multi-aperture acoustic array. The ALDV threaded a kevlar line under the sea ice between holes along a transect, for a heavier cable to pull through the acoustic array that was then lowered to the sea floor to connect to the fibre-optic cable to shore laid by Theseus.
1994
J. G. Bellingham and others, MIT Sea Grant Laboratory, Cambridge: Odyssey AUV observations of the under-ice topography in the Beaufort Sea as part of the Arctic Sea-Ice Mechanics research program.
M.G. McPhee, McPhee Research Company, S.F. Ackley, Cold Regions Research Laboratory, and others: Deployment of the ACTV vehicle during the ANZFLUX experiment to measure upper ocean turbulent fluxes in the winter marginal ice zone of the Weddell Sea and over the Maud Rise. While supported by the research icebreaker RV Nathaniel B. Palmer the deployments were from two drifting ice floes.
1995-6
J. Thorliefson and D. Hopkin, Defence Research and Development, Canada: Theseus AUV, under ice cable-laying as part of the Spinnaker project. 180km of cable laid to the north of Ellesmere Island, Nunavut.
1998
J. H. Morison, R. Light and D. Hayes, University of Washington: Surface Heat Budget of the Arctic Ocean (SHEBA) Ice Camp with REMUS AUV deployments to measure horizontal profiles of summertime ice-ocean boundary layer fluxes.
2001
J.G. Bellingham, Monterey Bay Aquarium Research Institute (MBARI): Dorado AUV CTD observations in the Greenland Sea from the USCGC Healy during the Atlantic Layer Tracking Experiment (ALTEX). Careful preparatory work included assessing the error budgets of ice profiling sonars, and how to identify "skylights" from ice profiling sonar to find spots for safe surfacing. Experience with navigation on the expedition led to a landmark paper on AUV navigation at Arctic latitudes, and lessons leant on ice profiling sonars.
A. Brierley, British Antarctic Survey, P. Fernandes Marine Scotland and M. Brandon, Open University: Under Sea-Ice and Pelagic Study (USIPS), Autosub observations of krill distribution, avoidance behaviour and sea ice thickness in the North Western Weddell Sea from the RRS James Clark Ross.
2002
P. Wadhams, University of Cambridge: Observations of the topography of the under side of sea ice with a sidescan sonar in the winter marginal ice zone of the East Greenland Current using a Maridan 150 AUV.
2003
A. Jenkins, and D. Hayes, British Antarctic Survey, M. Brandon and C. Banks, Open University: Sea-ice draft observations in the western Bellingshausen Sea with Autosub2, also observations of surface wave decay and directional spectra in the marginal sea ice zone. (Unable to reach the Pine Island Glacier).
2004
P. Wadhams, University of Cambridge: Sea-ice draft observations of first to multi-year ice, young ridges, old hummocks and undeformed ice, including under fast ice, using Autosub2 off NE Greenland.
J. Dowdeswell, University of Cambridge, K Heywood, University of East Anglia and others: Observations under ice in Courtauld Fjord and Kangerdlugssuaq Fjord, Eastern Greenland with Autousb2. Also collection of water samples by the AUV for tracer laboratory analysis of oxygen isotope ratio to estimate melt water content.
2005
D. Demer, National Marine Fisheries Service and M. Patterson, College of William and Mary: Nearshore acoustical survey including a Zodiac-deployed Sias-Patterson Fetch AUV. See page 112-123 of the US Antarctic Marine Living Resources Program Report for 2004/5.
K. Nicholls, P. Abrahamsen, British Antarctic Survey, K Heywood, University of East Anglia and others: Observations of ocean physics, oxygen isotope ratio, and ice shelf and seabed topography under the Fimbul Ice Shelf with the Autosub2 AUV. Autosub2 lost.
2007
R. Sohn, H. Singh, Woods Hole Oceanographic Institution, M. Jakuba, Johns Hopkins University, C. Roman, University of Rhode Island and others: Deployment of two near-seabed deep diving Seabed-class AUVs, Jaguar and Puma, as part of the Arctic Gakkel Vents Expedition from the Swedish icebreaker Oden, using long base-line navigation.
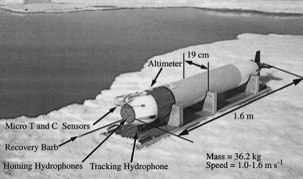
P. Wadhams, M. Doble, University of Cambridge, Richard Yeo and Eggert Magnusson, Gavia: Under sea-ice observations in the Beaufort Sea at the Applied Physics Laboratory Ice Station (APLIS) as part of the Sea Ice Experiment: Dynamic Nature of the Arctic (SEDNA) with a Gavia AUV. This expedition published the first digital terrain model of the underside of sea ice obtained from an AUV launched from an ice camp. Results have also been reported of a coincident AUV and airborne scanning laser to examine the relation between surface elevation and draft. Further notes are in section 4.1.2.6 of the SEDNA field report.
2008
EU DAMOCLES project: Glider observations of hydrography in Fram Strait, West of Svalbard. The Seagliders used an an ice-sensing capability to ensure safe surfacing.
EU DAMOCLES project: CTD observations from a Gavia AUV while concurrent measurements made from a thermistor chain moored from the ice surface.
P. Wadhams, M. Doble, University of Cambridge and A. Forrest and B. Laval, University of British Columbia: Detailed sea-ice draft measurements in the Lincoln Sea north of Ellesmere Island using a Gavia AUV.
W. Stone and others, Stone Aerospace: Exploration of West Lake Bonney, Taylor Dry Valley, Victoria Land, Antarctica using the Endurance AUV to characterise the aqueous chemistry in 3D, and create 3D maps of the under ice surface of the lake and the lake floor. Operations were through a hole in the 3m thick ice with the AUV ranging up to 700m from the hole. Extensive field notes are available.
2009
A. Jenkins, P. Dutrieux, British Antarctic Survey: Hydrographic, ice draft and seabed bathymetry under the Pine Island Glacier, Amundsen Sea, Antarctica with Autosub3 from the Nathaniel B. Palmer with implications fro the Glacier's retreat. The AUV data also led to the discovery of 'peculiar glaciated landscapes' - basal terraces on the melting ice shelf. The data has also been used to constrain a model of the subglacial bathymetry and sediment layers obtained from aerogravity.
H. Andradóttir, University of Iceland, A. Forrest and B. Laval, University of British Columbia: Study of the inflow dynamics from glacial groundwater springs into Lake Thingvallavatn, Iceland in open water, under ice and as the ice was breaking up. A Gavia AUV was used, from an ice camp, in conjunction with moored thermistor chains, CTD profiles and other measurements. The AUV gave the horizontal profiles of variability that could not be achieved with the other methods.
W. Stone and others, Stone Aerospace: Continued exploration of West Lake Bonney, Taylor Dry Valley, Victoria Land, Antarctica using the Endurance AUV to characterise the aqueous chemistry in 3D, and create 3D maps of the under ice surface of the lake and the lake floor. New this year was a forward-looking Delta T imaging sonar to identify objects. Camera images showed microbial mats. Extensive field notes are available.
2010
Natural Resources Canada, Defence Research and Development Canada, ISE Ltd.: Project Cornerstone, seabed bathymetry in ice covered areas in support of Canada's Outer Continental Shelf claim to UNCLOS. Under ice missions with an ISE Explorer class AUV from a base camp near Borden Island, Nunavut to a drifting ice camp 300km distant.
H. Singh, Woods Hole Oceanographic Institution: Multibeam studies of sea-ice topography in the Bellingshausen Sea with a Seabed AUV, part of the Ice Mass Balance in the Bellingshausen Sea (IceBell) expedition.
A. Kukulya, A. Plueddemann and others, Woods Hole Oceanographic Institution: Hydrographic observations beneath coastal sea ice offshore Barrow, Alaska with a REMU 100 AUV.
J. Berge, University Centre on Svalbard, M. Moline, California Polytechnic State University and others: Measurements of bioluminescence off Ny Ålesund, Kongsfjord, Svalbard during the polar night. A REMUS-100 AUV was used to gather data on acoustic backscatter, temperature, salinity and was also fitted with a bioluminescence bathyphotometer. The data also provided information on the advective origin of an under ice spring bloom.
A. Forrest, University of California Davis, A. Hamilton and others, University of British Columbia and others: Digital terrain mapping of fragments of the Petermann Ice Island in Lancaster Sound and Baffin Bay using Gavia and a 468kHz SwathPlus interferometric sonar and a 220/990kHz Imagenex side-scan sonar.
T Soltwedel and others, Alfred Wegener Institute, T. Wulff, University of Bremen: Phytoplankton production in the Marginal Ice Zone at 79˚N in Fram Strait observed using AWI's Bluefin AUV 'Paul' deployed from RV Polarstern. The sensors included Photosynthetically available Radiation (PAR) a fluorometer to estimate chlorophyll and a newly-developed system to collect 22 water samples of 220ml each.
C. Stevens, NIWA/University of Aukland, A. Forrest, University of British Columbia, and others: Deployment of a Gavia AUV beneath Erebus Glacier Tongue, McMurdo Sound, Antarctica. Access was via a hole in the sea-ice; data included photographic and sidescan imagery and water-column properties.
Shell Offshore (Houston and Anchorage): Deployments by C&C Technologies of a Kongsberg Hugin 1000 AUV from RV Ocean Pioneer in the Chukchi and Beaufort Seas off Alaska. The task was seabed survey with a sub-bottom profiler (Edgetech 216 single head), an Edgetech 120/410kHz sidescan sonar and a Kongsberg EM2000 multibeam sonar. Extensive marine mammal observations (ftp file download from NOAA) were made in conjunction with the vessel and AUV acoustic geophysical instrumentation. The program included extensive measurements of the sound levels emitted at various distances from all the acoustic sources on the AUV. This may be the most extensive set of such measurements in the public domain. Kleiner and others have described the development of this Hugin 1000 'Ice Class' AUV.
2011
T. Wulff and others, Alfred Wegener Institute: Deployment of AWI's Bluefin AUV 'Paul' during RV Polarstern cruise ARK 26/2 in the Fram Strait. Navigation of the AUV missions at the marginal ice zone were helped by a remotely controlled UAV (Hexacopter) directed to land on an ice floe and transmit its position, thereby tracking the movement of the ice.
A. Hamilton, A. Forrest, University of British Columbia and others: Pilot study using a Gavia AUV to map the underside of an iceberg to help understand mass loss processes. Operations from CCGS Amundsen, targeting the Petermann Ice Island fragments PII-Ba and PII-B in westen Lancaster Sound. The Gavia used an inverted SwathPlus sonar, an Imagenex sidescan sonar and other environmental sensors.
Natural Resources Canada, Defence Research and Development Canada, ISE Ltd.: Project Cornerstone, seabed bathymetry in ice covered areas in support of Canada's Outer Continental Shelf claim to UNCLOS. Expedition on the icebreaker CCGS Louis S. St-Laurent gathered multibeam data over a 100km track around Seven Spur, in the Southern Canada Basin along the Canadian-Alaskan margin.
2012
G. Williams, H. Singh, Woods Hole Oceanographic Institution and others: Multibeam studies of sea-ice topography off the Sabrina Coast of Wilkes Land, Antarctica during the Sea Ice Physics and Ecosystem Experiment II (SIPEX II).
A. Cadena and R. Ponguillo, Escuela Superior Politécnica del Litoral, Ecuador: Trials of a Seabed-class AUV for seabed photography in support of the Census of Antarctic Marine Life off Greenwich Island, South Shetland Islands, Antarctica.
T. Wulff and others, Alfred Wegener Institute: Deployment of AWI's Bluefin AUV 'Paul' during RV Polarstern cruise ARK 27/2 in the Fram Strait. This was the first 'Paul' expedition to use a 'float' manoeuvre with the AUV, ascending under buoyancy alone at 10-20cm/s to give very fine scale data in the vertical with minimal disturbance to the environment.
A. Hamilton, A. Forrest, University of British Columbia and others: Pilot study using a Gavia AUV to map the underside of an iceberg to help understand mass loss processes. Operations from CCGS Amundsen, targeting the Petermann Ice Island fragments PII-Ba and PII-B in westen Lancaster Sound. The Gavia used an inverted SwathPlus sonar, an Imagenex sidescan sonar and other environmental sensors.
K. Kim, T. Ura and K. Nagahashi, Institute of Industrial Science, University of Tokyo, and others: Demonstration trials of the Aqua Explorer 2000a (AE2000a) AUV beneath ice floes in the Sea of Okhotsk, off Mombetsu, Hokkaido, Japan in March 2012. The trials were designed to test strategies for using AUVs to automatically profile the undersides of icebergs and to map seabed gouges due to icebergs on future Arctic missions.
2013
T. Maksym and others, Woods Hole Oceanographic Institution and J. Wilkinson, Polar Ocean Services: Trials of Jaguar, a Seabed-class AUV, running adaptive missions to simulate tracking of under ice oil spills. Part of the US Coastguard Research and Development Center's Arctic Shield September 2013 programme from the USCGC Healy north of Barrow, Alaska.
T. Wulff and others, Alfred Wegener Institute: Deployment of AWI's Bluefin AUV 'Paul' in the Fram Strait from RV Maria S. Merian on MSM29 to study physical and ecological processes. For this study the instrument suite included an UV-based nitrate sensor and a pCO2 sensor. The water samples were used to calibrate the sensors.
A. Forrest, B Laval, University of British Columbia and ? Kirillin: Observations in an ice-covered polar lake - Lake Kilpisjärvi, Finland. The Gavia AUV was temporarily lost (for 123 hours) on its fourth mission, after completing three successfully.
2014
R. Beecroft, A. Forrest and others, Australian Maritime College and others: Observations of the ice-ocean boundary layer in McMurdo Sound, Ross Sea, Antarctica including a comparison on current data from an ADCP on a Gavia AUV and a stationary under-ice ADCP.
V. Lucieer, A. Forrest and others, University of Tasmania: Fine scale sea ice structure characterised using a GeoswathPlus multibeam sonar on a Gavia AUV. Capturing spatial scales of spatial heterogeneity of Antarctic sea ice algae using a multispectral radiometer on the Gavia AUV.
A. Jenkins, S. Kimura, British Antarctic Survey, D Davies, University of Edinburgh and others: Hydrographic, turbulent microstructure, ice draft and seabed bathymetry under the Pine Island Glacier, Amundsen Sea, Antarctica with Autosub3 from the RRS James Clark Ross.
C. German, A. Bowen and others, Woods Hole Oceanographic Institution, C. Katlein and others, Alfred Wegener Institue, Germany: Investigations of physical and biogeochemical processes at the ice ocean interface with the Nereid Under Ice (NUI) hybrid ROV/AUV in the Arctic at 82-83˚N. Studies included influence of ice thickness and properties on light transmission, and the evolution of a phytoplankton bloom beneath the ice.
2015
W. Stone and others, Stone Aerospace: Deployment of Sunfish small person-portable AUV through an ice hole in McMurdo Sound, then through an ice hole in front of the Ross Ice Shelf. Followed by deployments of the much larger, hover capable, 20km range Artemis AUV through an ice hole. A fiber optic tether provided real-time visual and sonar imagery to the people at the ice camp and a docking sub-system enables effective recovery of the vehicle.
A.A. Mogstad and others, Norwegian University of Science and Technology and others: Site investigation and sonar imaging of the wreck of the Figaro, a floating whalery that sank in Isfjorden, Svalbard in 1908. A Remus 100 AUV equipped with a Marine Sonic Technology Ltd. 900 kHz sidescan sonar acquired seabed and wreck imagery with navigation aided by two acoustic beacons forming a Long BaseLine system.
2016
C. German, M. Jakuba, A. Bowen and others, Woods Hole Oceanographic Institution: Seafloor studies with the Nereid Under Ice (NUI) hybrid ROV/AUV near 87˚N in the Arctic.
J. Joseph, D. Horner and others, US Naval Postgraduate School: Characterising the acoustic conditions under ice, Beaufort Sea, 360km north of Deadhorse, Alaska during US Navy ICEX, 2016. Use of four Expendable Mobile Acoustic Training Targets (EMATTs) as unmanned sources of sound and a REMUS AUV to observe, among other properties, under-ice topography.
J Howe and others, Scottish Association for Marine Science, K. Husum, Norwegian Polar Institute: Deployments of a Gavia AUV from the recently exposed seabed of four tidewater glaciers at Svalbard, using sidescan sonar to study the bedforms and hydrographic measurements to detect subglacial meltwater. (Also in 2017).
H. Meyer and others, University of Bergen: Investigations of sponge populations on Schultz Bank, on the Arctic Mid-Ocean Ridge (73˚ 47'N, 7˚ 40'E) using a Kongsberg Hugin 1000 AUV fitted with a Kongsberg HISAS 1030 synthetic aperture sonar, a EM2040 multibeam echosounder and a downward-looking 10 Megapixel TileCam low light optical camera with a 720-LED light bar. 9953 images were collected by the camera in 2.78 hours of which 430 'optimal' images were analysed.
2017
M. Meister and others, Georgia Institute of Technology: Trials of the Icefin hybrid ROV/AUV near the Erebus Glacier Tongue, McMurdo Sound, Ross Sea, Antarctica.
A. Forrest, University of California, Davis and others: Observations of under ice shelf topography and basal roughness of the Nansen Ice Shelf, western Ross Sea using the University of British Columbia Gavia AUV. The Gavia deployment, together with a Slocum glider, was part of the Land-Ice/Ocean Network Exploration with Semiautonomous Systems (LIONESS) collaborative programme led by the Korean Polar Research Institute with the icebreaker RV Araon. The AUV ended up 'skipping' along the underside of the ice rather than the planned 20m stand-off.
O. Hegrenaes and others, Kongsberg Maritime: Inspection of pipelines under an ice-covered lake 'in North America' using a MUNIN AUV with launch and recovery from a low-logistics ice camp. This collaboration with Ballard Marine Construction provided lake-bed bathymetry to International Hydrographic Organization (IHO) S-44 Special Order specification. Their survey was, "to our best knowledge is the first commercially delivered under-ice survey carried out bu an AUV". However, there was the 2010 AUV expedition for Shell Offshore by C&C Technologies in the Beaufort and Chukchi Seas.
2018
A. Jenkins, British Antarctic Survey: Two Autosub Long Range missions under the Filchner and Ronne Ice Shelves, southern Weddell Sea, Antarctica from RV Polarstern.
T. Wulff and others, Alfred Wegener Institute: Deployment of AWI's Bluefin AUV 'Paul' in the Fram Strait from RV Maria S. Merian on MSM77 to conduct ice, ocean, atmosphere interaction studies on the impact on the ecosystem and with the vehicle in a different configuration, to map the seafloor with a sidescan sonar. Of six dives, five were successful, with a total distance of 67km and a deepest depth of 1514m.
Z. Koenig and others, University of Bergen: Observations of turbulence at a near-surface temperature front in the Nansen Basin of the Arctic Ocean using a 2.4 m long OceanScan Light AUV (LAUV) rated to 100 m depth, Harald. Deployed to cross the front, and to use adaptive sampling, the AUV profiled to 100 m depth on 38 dives covering a 5 x 5 km area.
2019
A. Wahlin, University of Gothenburg, E. Pettit, K. Heywood, University of East Anglia: Temperature and salinity observations beneath Thwaites Glacier, Amundsen Sea, from two short deployments (0.6 km and 3 km) of Rán, a Hugin AUV, as part of the Thwaites-Amundsen Regional Survey and Network (TARSAN) project. CTD and oxygen data are publically available. Their data showed a previously unknown convergence zone.
J. Dowdeswell and others, University of Cambridge: Use of two deep-diving HUGIN AUVs for multidisciplinary studies in the Weddell Sea on the SA Aghullas II. During the expedition, communication with "AUV 7" was lost and worsening sea-ice conditions led to the search having to be abandoned.
G. Williams, D. Gwyther, P. King and others, University of Tasmania: Observations beneath the Sørsdal Glacier, near Davis Station, Antarctica with the nupiri muka ISE Explorer class AUV. Prior to the expedition an expert panel was convened to assess the preparedness of the team. Results from the AUV showed cold water within the cavity with weak basal melting.
K. Metfies, Alfred Wegener Institute: Seafloor studies with camera and sidescan sonar at the Hausgarten Observatory between Greenland and Svalbard using the Bluefin AUV 'Paul' from RV Polarstern.
J. Coogan, M. Inall and others, Scottish Association for Marine Science: Deployment of hand-portable 4kg ecoSUB Robotics Ltd. ecoSUB at the Kronebreen glacier, Svalbard.
2020
D. Lannuzel, P. King and others, Australian Maritime College, University of Tasmania: Deployment of nupiri muka Explorer-class AUV under sea ice missions in the Amundsen Sea, near the front of Thwaites Glacier, from the Republic of Korea icebreaker Araon.
B. Schmidt and others, Georgia Institute of Technology: Icefin under Thwaites Glacier and Kamb Ice Stream, including visual and sonar imagery from near the grounding zone. Deployment through a hole in the ice shelf rather than from the seaward edge.
H. Schmidt and others, MIT: Deployment of a (Bluefin) General Dynamics-Missions Systems (GD-MS) AUV under ice in the Beaufort Sea as part of the US Navy ICEX-2020 programme to test a new integrated acoustic communications and navigation concept to provide "GPS-level accuracy" positioning. Part of the challenge of effective acoustic communication was the presence of freshwater under ice - the Beaufort Lens, discussed in an MSc thesis by Goodwin.
H. Yamagata and others, University of Tokyo, JAMSTEC and others: Trials of a hover capable AUV designed specifically for detailed observations under ice - MONACA. This new AUV is designed to augment the capabilities of Japan's icebreaker RV Shirase. MONACA is of medium size, 2 m length and 235 kg mass and has four vertical thrusters. The November 2020 trials were off Shimoda, Japan.
A. Konoplin and others, Institute for Marine Technology Problems, Russian Academy of Sciences, describe operations of the MMT-3000 AUV in the Southern Ocean. MMT-3000 is a medium size AUV, with a mass of 200 kg and a length of 2.2 m. Instruments were on the vehicle for visual imaging of zooplankton density and benthic animals. The area of investigation included Bransfield Strait and Antarctic Sound.
2021
The Tansuo 4500 AUV, developed by China's Shenyang Institute of Automation, was deployed from the research icebreaker Xuelong 2 in the Chukchi Sea. Its missions included "near-seabed research". To aid recovery the AUV combines acoustic remote control and automatic guidance. The vehicle also has automated fault tracing and decision making.
2022
A., Wahlin, University of Gothenburg and colleagues deployed Rán, a Hugin AUV, on 14 missions in the Amundsen Sea from the RV Nathaniel B. Palmer.
The UK National Oceanography Centre (NOC) deployed their ALR-1 vehicle from the RV Nathaniel B. Palmer in the Amundsen Sea. Extensive sea ice in front of the Thwaites Glacier meant that their plans changed to running imssion(s) under the adjacent Dotson Glacier. The highlight of the 101-day campaign for ALR-1 was a 40 km ... awaiting info from Maaten.
The Endurance22 expedition in association with the Falklands Maritime Heritage Trust deployed two SAAB Sabertooth hybrid AUV/ROV vehicles to search for, and find, SY Endurance in the north western Weddell Sea. The Endurance was crushed by sea ice in 1915 during Sir Ernest Shackleton's Imperial Trans-Antarctic Expedition. Working from the research icebreaker S.A. Agulhas II the team made full use of real time telemetry via a fibre-optic tether of vehicle status and sonar data from the Sabertooths. This telemetry was considerd essential to mission success after the loss of a Hugin AUV on the same task in 2019.
To submit a Case Study or add to this Chronology please use our Contacts page.

Gavia AUV configured with its DVL and Geoswath sonar for looking at the underside of ice on the SEDNA experiment in 2007. For scale, the vehicle is 2.9m long and 0.2m in diameter. From Doble et al. (2009), Cold Regions Science and Technology.

Deployment (or recovery) of Puma, a Seabed-class AUV) from the Oden icebreaker on the AGAVE 2007 Arctic expedition. Courtesy R. Sohn, WHOI.
REMUS-100 AUV with its sensors for ice-ocean boundary layer flux measurements at the SHEBA ice camp in 1998. From Hayes and Morison (2002), J. Atmospheric and Oceanic Technology.

Image from a VideoRay mini-ROV of the ISE Explorer AUV beneath ice at the Project Cornerstone base camp on sea ice off Borden Island, Canada, 2010. Courtesy Cornerstone Newsletters.

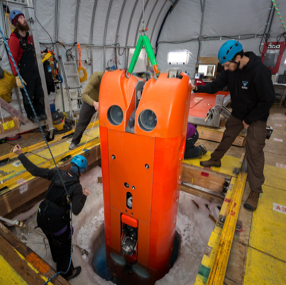
Nereid Under Ice (NUI) hybrid ROV/AUV deployed from the RV Polarstern near 83˚N in 2014 on its first under ice deployment. Image courtesy Woods Hole Oceanographic Institution.

Icefin under sea ice off McMurdo Station, Ross Sea, Antartica during its 2017 deployment. Image from Ben Hurwitz, Georgia Institute of Technology on ResearchGate.

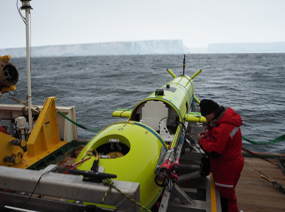
Rán, a Hugin AUV from the University of Gothenburg, near the Thwaites Glacier, deployed from the RV Nathaniel B. Palmer in 2019. Image from Johan Rolandsson, University of Gothenburg.
Nupiri muka, an Explorer AUV from the University of Tasmania, near the Thwaites Glacier in 2020 where it undertook its first long distance under sea-ice mission. Image from Isak Bowden-Floyd, Australian Maritime College.

Bluefin 21 AUV 'Paul' operated by the Alfred Wegener Institute at the marginal ice zone in Fram Strait. Image from Alfred Wegener Institute.

Stone Aerospace's Endurance AUV at the ice camp on West Lake Bonney, Taylor Valley, Antarctica prior to its deployment in December 2008. Image from Stone Aerospace.

Kongsberg Maritime MUNIN AUV at a camp on on undisclosed ice-covered lake in North America during a pipeline survey in 2017. Image from Kongsberg Maritime.
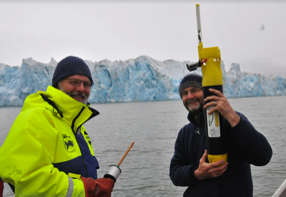
A 4kg ecoSUB Robotics Ltd. ecoSUB prior to deployment off the Kronebreen Glacier, Svalbard in 2019 by the Scottish Association for Marine Science. Image courtesy SAMS.

Kongsberg Hugin class AUV owned and operated by Ocean Infinity deployed from the icebreaker S.A. Agulhas II in the northwestern Weddell Sea in 2019. The expedition had scientific objectives to study the seafloor morphology and shallow stratigraphy and also to attempt to find the wreck of Sir Ernest Shackleton's SY Endurance. Image courtesy Prof Julian Dowdeswell, SPRI.

Aqua Explorer 2000a (AE2000a) AUV during trials under sea ice floes in the Sea of Okhotsk in March 2012. The forward diving planes can just be seen under the surface, these aid run-up diving in ice-covered waters. Image courtesy Institute of Industrial Science, The University of Tokyo, Japan.

General Dynamics and MIT collaborated to deploy MIT's Bluefin-21 Macrura AUV through a hole in 6 foot thick ice in the Beaufort Sea during the US Navy exercise ICEX-2020. (Image Credit: Dan McDonald, General Dynamics Mission Systems)

MONACA - an AUV designed for under ice operations in conjunction with the RV Shirase. Image from University of Tokyo.

The Tansuo 4500 AUV being recovered on an Arctic mission in summer 2021. Image from the Shenyang Institute of Automation.

MMT-3000 AUV prior to deployment on a mission off the Antarctic Peninsula in 2020. Image from IMTP, Vladivostock.