

Principal Investigator and Contacts
Dr. Jon Thorliefson and Mr. David Hopkin (both retired)
Defence Research and Development Canada
9 Grove Street
Dartmouth, Nova Scotia, Canada
Dates
March – April 1995 and March – April 1996
Aim of project
To lay approximately 220 km of fibre-optic cable on the seabed at a point commencing
approximately 25 km north of the Canadian military base CFS Alert (82°30, 62°20).
Funding Agency
Department of National Defence, Canada
Details
Work on this project started in the early 1980s. From the perspective of AUV development, the International Submarine Engineering ARCS AUV was used as a scale model/testbed between 1987 and 1992. Navigation, control, and power system development were undertaken as well as hydrodynamic modelling. Design of the larger Theseus vehicle commenced in 1993, with fabrication following in 1994. The vehicle was first tested in local waters in the fall of 1994 and then airlifted to the CFS Alert base by CC 130 in March 1995 for Arctic tests as a prelude to the missions planned in 1996.
Location: The area of operations extended from approximately 25 km north of the Canadian military base CFS Alert (82°30, 62°20) to a point 230 km due north.
Cruise plan/mission: Two cable lay missions were conducted in 1996. The first of these is described in detail in the December 1999 issue of Sea Technology. The second mission was similar. In 1995, a number of shorter missions were run under the ice from essentially the same location.
Length of mission(s): Approximately 60 hours at a speed of 4 knots.
Operational base: Ice camp.
Ice type: Permanent, close heavy multi-year ice.
Water depth: Between 70 and 700 meters
Deployment/Recovery methods: An ice shelter was established on the ice. Within this shelter a large hole was cut in the ice, big enough to lower the AUV through. The AUV was lowered by gantries through this hole to its initial operating depth and then released. For recovery, the AUV homed on a beacon below the ice hole, and then stopped on the bottom. A Phantom ROV was deployed to the AUV to connect the lift lines and the vehicle was hauled to the surface.
Vehicle Specifications
AUV class/type: ISE Theseus AUV 9600 kg with cable, 10.7 meters in length, 1.15 meters diameter
Navigation/positioning systems: Honeywell MAPS INU coupled with an EDO 3050 DVL. For acoustic positioning, an ORE LXT system was used.
Obstacle avoidance:
Sonatech STA 013- 01.
Homing/guidance: Inverted USBL - Model Datasonics ACU 206
Emergency measures: Vehicle fitted with comprehensive software failsafe program Locator Beacon 11 kHz – ORE 6702
Parameters logged: All vehicle data.
Communications: Datasonics ATM 851 – 15 to 20 KHz MFSK acoustic telemetry.
Other equipment: Variable ballast system (tanks fore and aft) to vary the overall weight of the vehicle). A cable ballast system was also developed to compensate for the change in weight as the cable was dispensed from the AUV.
Debrief/dissemination
Publications/web sites arising from project:
Three articles in Sea Technology: April 1995, February 1999 and December 1999, although these are not available online.
May 1999 issue of GPS World.
Paper at the Offshore Mechanics and Arctic Engineering Conference, St. John's Newfoundland, July 1999.
DRDC Presentation given at the Masterclass at Southampton as part of the Cooperative Autosub Science in Extreme Environments programme, 2007.
Details of the mission
The first mission was conducted between April 16th and 18th 1996 without incident and the cable was connected to a US acoustic sensor. A second mission was conducted on the 22nd of April 1996 with a spare cable whose integrity was suspect. During the return leg of the mission, a fault in the EDO DVL caused the vehicle to shut down on the seabed. Action was taken to locate the vehicle, and subsequently to correct this fault and send the vehicle on its way to the recovery point.
Lessons learned for future deployments
While the cable was operational for some time, it eventually fatigued and failed. It is probable
that this was due to interaction or abrasion on the seabed.




The Theseus AUV in final preparation at the International Submarine Engineering Ltd. facility at Port Coquitlam, British Columbia. Note the person near the vehicle's nose to give an idea of scale.
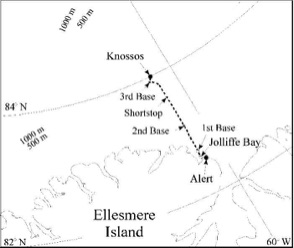
Map showing the base camp for the Spinnaker project at Jolliffe Bay, near the Canadian Forces Station at Alert, Ellesmere Island, the intermediate acoustic rendezvous positions and the cable termination point at Knossos Camp.
Images and the map courtesy of the late James Ferguson, ISE.
Some of the Theseus team at Alert.
Helicopter support was an essential part of the logistics for the Spinnaker project for the ice camps.
Image of Theseus under the ice taken from the Phantom ROV that was an essential part of the recovery procedure, to attach lines to the vehicle, and for emergency location and recovery if that had been needed.