This revised and extended Polar AUV Guide is an activity of the Society for Underwater Technology's Panel on Underwater Robotics. The Panel's international membership includes a number of people from industry and the research community with hands-on experience of operating AUVs in the Polar Regions. In addition, the Panel has held special sessions with invited experts on the technology and applications of AUVs appertaining to the Polar Regions.
The intention is for this Guide to be updated in two ways:
• By working through the 'back catalogue' of Polar AUV expeditions not yet covered in the Chronology or the Case Studies and
• By new material being submitted by the wider community. To that end we have a Case Study Proforma, with full details on our Contact page.
The links below will give you information on the back story to this guide, how it came into being, the original and current contributors and some of the definitions we use in the Guide.
We welcome your comments on how this Guide could be of even more value to you.
Note: Illustrations used on this site have been credited with their source, unless they have been provided by the past or current contributors from their personal collections. If we have missed a credit, please let us know via our Contact page.
About this Guide
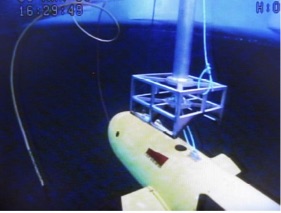
AUV MERLIN - an ISE Explorer class vehicle - operated by Memorial University of Newfoundland under the Catchy docking cradle as filmed by an ROV on Arctic under-ice trials in 2009. From MERLIN - A decade of large-AUV experience at Memorial University of Newfoundland.

