The following definitions are used on this site, and may have different meanings elsewhere.
Autonomous Underwater Vehicle
An untethered, underwater vehicle which is programmed to carry out a pre-planned or supervised mission and which may include sensors, especially collision avoidance sensors, that will result in the vehicle altering its path depending on the environment it encounters.
Hybrid Mission
Ice-Based Mission with a termination at a ship, or vice-versa.
Ice Based Mission
An AUV mission that originates from a hole in the ice and terminates at the same or another ice hole.
Sea-Based Mission
An AUV mission which originates and terminates from a ship located near an ice edge (sea ice or ice shelf).
Definitions
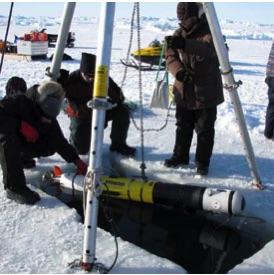
Hydroid Remus 100 AUV being deployed through an ice hole, offshore of Barrow, Alaska, in March 2010. Image by Amy Kukulya, from Under-ice operations with a REMUS-100 AUV in the Arctic
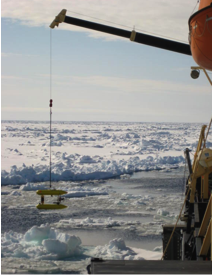
Woods Hole Oceanographic Institution Jaguar AUV being deployed from the Swedish icebreaker Oden near the Gakkel, Ridge, central Arctic, summer 2007. Image from Deep sea underwater robotic exploration in the ice-covered Arctic Ocean with AUVs.

