Some example images of Ice Types
Grease Ice: Autosub making its way on the surface, its antennas and flashing light beacons leaving a track in the grease ice. Courtesy Peter Stevenson.



Nilas: Autosub at the surface during a recovery through a layer of Nilas ice. Courtesy Peter Stevenson.

Pancake Ice: Courtesy University of Washington, APL.

First year Ice: Autosub recovery afer a mission beneath first-year ice in the Amundsen Sea. Sea-ice draft from this and other missions were reported in Banks et al. (2006).

Multi-year Ice: Ridged multi-year ice floes in the central Weddell Sea, with a lead in the middle distance. This type of ice cover forms a very hazardous environment for AUV operations. Even the heavy icebreaker USCGC Glacier, from which this image was taken, had difficulty making a passage.

Fast Ice: Autosub recovery after a 130km round-trip mission under Fast Ice off North East Greenland. Ice draft measurements from this mission were reported in Wadhams et al. (2006)
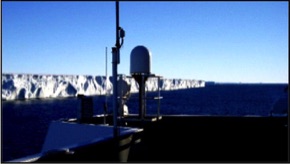
Ice Shelf: RRS James Clark Ross in front of the Fimbul Ice Shelf, Queen Maud Land, Antarctica prior to Autosub2 Mission 383 from which it did not return. The full investigation into the possible causes were reported in Strutt et al. (2006).
AUV operators and others using AUVs in polar waters should familiarise themselves with the ice types likely to be encountered. Authoritative texts such as 'Ice in the Ocean' (Wadhams, 2000) 'Polar Operations' (MacDonald, 1969) or a Glossary such as that from ASPeCt ) will provide full details.
As a quick reference, we list below a summary of key sea and land-derived ice types and ice features, with standard definitions published by the World Meteorological Organisation (WMO, 1970) in italics, and implications for AUV operations of each ice type noted. Second, we summarise the types of open water characteristics encountered in and near sea ice zones.
Sea Ice
• Frazil: Fine spicules or plates of ice, suspended in water.
Hypothesised to be a potential hazard to AUV CTD sensors that are pumped through a sample tube. The hazard is that the inlet may become clogged. Where the conductivity cell is tubular and exposed, or where the port of an exposed pressure sensor provides a "dead space", there is also a risk of clogging. There has also been concern over potential build up of frazil ice on control surfaces.
• Grease: A later stage of freezing than frazil ice when the crystals have coagulated to form a soupy layer on the surface. Grease ice reflects little light, giving the surface a matt appearance.
Grease ice is unlikely to be detected by an AUV that uses sonar to ascertain where and whether open water exists above its intended surfacing point. As such it poses a minor hazard, perhaps most critically to the visual sighting of the vehicle prior to recovery. Added drag may make a run-up dive difficult or impossible.
• Nilas: A thin elastic crust of ice, easily bending on waves and swell and under pressure, thrusting in a pattern of interlocking "fingers" (finger rafting). Has a matt surface and is up to 10 cm in thickness. May be subdivided into dark nilas and light nilas. Dark nilas is less than 5 cm thick and very dark in colour. Light nilas is 5-10 cm thick and reflects proportionately more light than dark nilas, depending on its thickness.
Similar concern as for grease ice, but with the added hazard that light nilas in particular would pose to appendages on the AUV such as radio and navigation antennas.
• Pancakes: Predominantly circular pieces of ice from 30 cm - 3 m in diameter, and up to 10 cm in thickness (unrafted), with raised rims due to the pieces striking against one another. It may be formed on a slight swell from grease ice, shuga or slush or as the result of the breaking of ice rind, nilas or, under severe conditions of swell or waves, of grey ice.
Certainly a hazard for appendages on an AUV and to sighting a surfaced vehicle.
• Young ice: Ice in the transition stage between nilas and first-year ice, 10-30 cm in thickness. May be subdivided into grey ice and grey-white ice.
Likely to be detected by an upward-looking sonar; hence a suitably equipped AUV should not surface beneath young ice. Unlikely to be visible if it does surface beneath this type of ice, and significant damage may result to appendages.
• First year ice: Sea ice of not more than one winter's growth, developing from young ice; thickness (typically) 30 cm - 2 m. May be subdivided into thin first-year ice/white ice, medium first-year ice and thick first-year ice.
Should be easily detected by an upward-looking sonar on an AUV. If the AUV becomes stranded beneath first year ice, then it is likely that a support ice-strengthened ship (if that is the platform) would be able to break a passage should there be acoustic or other contact with the stranded vehicle.
• Multi-year ice: Old ice up to 3 m or more thick, which has survived at least two summers' melt. Hummocks (hillocks of broken ice that have been forced up by pressure) even smoother than in second-year ice, and the ice is almost salt-free. Colour, where bare, is usually blue. Melt pattern consists of large interconnecting irregular puddles and a well-developed drainage system.
Easily detected by an upward-looking sonar on an AUV. If the AUV becomes stranded beneath multi year ice, then it is less likely that a support ship (if that is the platform) would be able to break a passage through extensive multi year ice except at a very slow speed.
• Fast ice: Sea ice which forms and remains fast along the coast, where it is attached to the shore, to an ice wall, to an ice front, between shoals or grounded icebergs. Vertical fluctuations may be observed during changes of sea-level. Fast ice may be formed in situ from sea water or by freezing of pack ice of any age to the shore, and it may extend a few metres or several hundred kilometres from the coast. Fast ice may be more than one year old and may then be prefixed with the appropriate age category (old, second-year, or multi-year).
Multi-year fast ice may be impenetrable for a support vessel, and recovery of an AUV stranded under multi-year fast ice at a distance from the ice edge may not be feasible. However, fast ice does break away, and so it would be wise to have sufficient emergency telemetry systems on an AUV used under fast ice such that if it became stranded it would have the capacity (and the energy endurance) to telemeter its status and position.
• Brash ice: Accumulations of floating ice made up of fragments not more than 2 m across; the wreckage of other forms of ice.
Brash ice can form a hazard at launch and recovery. The ice pieces are large enough to cause damage to propellers and antennas. In an area with brash, diving using a surface run-up may not be not feasible and a dive-weight option may be necessary.
Land-derived Ice
• Ice shelf: A floating ice sheet of considerable thickness showing 2-50 m or more above sea-level, attached to the coast. Usually of great horizontal extent and with a level or gently undulating surface. Nourished by annual snow accumulation and often also by the seaward extension of land glaciers. Limited areas may be aground. The seaward edge is termed an ice front.
An AUV mission under an ice shelf is undoubtedly hazardous. In the event of the vehicle becoming stranded, there would be very little possibility of cost-effective recovery. An AUV mission under an ice shelf (Nicholls et al., 2006) has shown that areas of rough topography exist, on scales of metres to hundreds of metres, which may increase the risk if the AUV needs to navigate close to the under side. Under some ice shelves (e.g. the Filchner Ronne), refreezing takes place, and sub-surface frazil ice would be expected, which may be an additional hazard.
• Glacier tongue: Projecting seaward extension of a glacier, usually afloat. In the Antarctic, glacier tongues may extend over many tens of kilometers.
A similar hazard to beneath an ice shelf.
• Iceberg: A massive piece of ice of greatly varying shape, more than 5 m above sea-level, which has broken away from a glacier (or an ice shelf), and which may be afloat or aground. Icebergs may be described as tabular, dome-shaped, sloping, pinnacled, weathered or glacier bergs (an irregularly shaped iceberg).
As icebergs drift, they are a transient hazard. AUV missions may involve deliberate transects under icebergs, in which case temporary or extended stranding may be possible, especially if icebergs have areas of rough bottom topography. Icebergs are also a challenge to collision avoidance systems, specular reflection of sonar beams from smooth ice may reduce the effective range of detection.
• Bergy bit: A large piece of glacial ice generally showing less than 5m above sea-level but more than 1m and normally 100-300 square metres in area.
Bergy bits can prove a challenge for AUV collision avoidance surface given their shallow draft and small surface area. Most hazardous for unescorted missions that need to profile to the surface.
Sikussak
A Greenlandic Innuit word, sikussak is not a termthat is in the WMO Sea-Ice nomenclature, but is used among the sea-ice community and it has posed problems for AUV operations. Sikussak is a 'melange' of multi-year sea ice with bergy bits or even small icebergs within a frozen continuum of ice. If over 20m thick is may be called a composite ice shelf. Sikussak that had broken away from the front of Kangerdlugssuaq Fjord, Greenland prevented ship and Autosub AUV access to the Kangerdlugssuaq Glacier in 2004.
Open water characteristics
• Lead: Any fracture or passage-way through sea ice which is navigable by surface vessels, more generally applied to linear features, and
• Polynya: Any non-linear shaped opening enclosed in ice. Polynyas may contain brash ice and/or be covered with new ice, nilas or young ice; submariners refer to these as skylights. Sometimes the polynya is limited on one side by the coast and is called a shore polynya or by fast ice and is called a flaw polynya. If it recurs in the same position every year, it is called a recurring polynya.
Leads and polynyas offer opportunities for AUV launch and recovery within ice-covered areas. Their limited extent, and the presence of ice of different forms mean that run-up diving may not be feasible due to lack of space or the risk of damage from brash or new or young ice or additional drag caused by grease ice. In such cases, a dive-weight dive is preferable. Recovery to leads and polynyas is feasible, but only if the AUV is fitted with a homing system or other form of terminal guidance. As leads and polynyas are transient features, which may form and reform, relying on preprogrammed positions is not ideal, and carries risk except for very short duration missions. Some extensive polynyas, the North West Water off Greenland and the Weddell Sea polynya for example, when they exist, are potential research sites for AUV measurements of the sensible and latent heat fluxes that form and maintain polynyas.
Ice Types that may be faced by AUVs in Polar Operations


Sikussak: Extending some 20km from this position to the front of Kangerdlugssuaq Glacier, East Greenland, sikussak prevented ship and AUV access to the ice front. Image from the James Clark Ross Cruise 106S report.