

Principal Investigator and Contacts
Professor Julian Dowdeswell
Scott Polar Research Institute
University of Cambridge
Lensfield Road
Cambridge CB2 1ER UK
Note: this information provided by G Griffiths, National Oceanography Centre, Southampton
Dates
30 August 2004 to 16 September 2004
Aim of project
(edited from the cruise report)
Cruise JR106S provided part of the Arctic component of the Autosub Under Ice programme, linking glaciers in Greenland with the adjacent fjord and ocean waters. The project aimed to investigate the glaciological, physical oceanographic and biological processes occurring beneath and adjacent to glaciers and ice sheets, the interaction between the polar ocean and the underside of the shelves, and their role in determining the mass balance of the ice shelves and the larger scale oceanic conditions. Very little is currently known about the water beneath and near glacial ice. The study area for JR106S was the glacier-fjord-shelf system, focusing on Kangerdlugssuaq Fjord in East Greenland. This area was chosen because the fjord was only about 70 km long, making it logistically tractable. However, the inner fjord system proved to be un-navigable during the study period due to the breakout of a large area of sikussak (a mix of multi- year sea ice and icebergs) at the time that we entered the fjord, releasing a huge amount of floating ice and to the very high winds in the inner fjord system. However, successful Autosub and ship deployments were made elsewhere in the fjord system, and data were collected immediately adjacent to a tidewater glacier. A combination of Autosub and ship-based measurement were used, Autosub achieving near-ice and synoptic surveys that were not possible with the ship. Several notable features of cruise JR106S were:
• Acquisition of the first AUV swath and sub-bottom profiler data from adjacent to the tidewater margins of glaciers
• First acquisition of synoptic CTD data from close to tidewater glacier ice cliffs
• First successful use of Aqualab, a water sampling device installed in Autosub, to collect samples for the analysis of stable isotopes of oxygen.
• Sea-floor photographs in glacier-influenced waters using Autosub, showing the nature of both the marine biota and of ice-rafted debris
• CTD and bathymetric data collected to enable the calculation of melt-water flux to the adjacent ocean from one of the ten major fast- flowing outlet glaciers of the Greenland Ice Sheet.
In addition, a number of other comprehensive datasets on the geology, oceanography and marine biology of this Arctic fjord-shelf region were acquired.
Funding Agency
UK Natural Environment Research Council
Details
Location: Kangerdlugssuaq Fjord, East Greenland
Operational base: Research ship RRS James Clark Ross
Ice type: Varying from sikussak, multi year fast sea ice with embedded icebergs to first year ice and brash. Iceberg draft varied from 50 to 400 m. Also, the waters were turbid, due to glacial flour.
Water depth: From 100–170m in Courtauld Fjord to over 500 m on the outer shelf where photographic
missions were run.
Deployment/Recovery methods: Dedicated launch and recovery gantry and servicing area on stern of the ship, comprising two modified 20’ shipping containers in an offset ‘T’ shape. Vehicle brought alongside on the starboard side by manoeuvring the ship; recovery float ‘popped’ by command, and lines deployed from the vehicle; grappled from the ship, and the vehicle ‘walked’ aft, round the starboard quarter and to the stern. Critical period is when lines/vehicle near the stern.
Vehicle Specifications
AUV class/type: AUV Autosub class – 6.8m long, 0.9m in diameter ~3000kg displacement. Endurance over 400km at 1.7 m/s. Diving depth to 1600m. Primary manganese alkaline battery ca. 60kWh. Dive weight for rapid diving in ice-infested areas, triggered on a mechanical pressure release.
Navigation/positioning systems: GPS/DR, using Navstar IDAR GPS receiver and IXSEA PHINS fibre-optic gyrocompass, with downward looking RD Instruments 150 kHz ADCP in water-track mode, facility for using ‘bottom track’ on underside of ice from the upward-looking 300kHz RD Instruments ADCP.
Obstacle avoidance: Implemented using a forward-looking Simrad Mesotech 120kHz ‘altimeter’ and range information from the beams from the ADCP.
Emergency measures: abort on over depth, on leak in any of the main pressure vessels, on mission over allocated time, on range of faults such as power loss, loss of internal network data communications. Abort drops a weight and vehicle rises to the surface.
Parameters logged: The full inventory of data and parameters logged is available on the BODC archive for this project. Also, the full cruise report pdf file is available.
Equipment: Two Sea-bird 911 CTDs, one each side of the vehicle nose; fluorometer for estimates of chlorophyll A; transmissometer; oxygen probe; RD Instruments 300 kHz ADCP looking up and an RD Instruments 150 kHz ADCP looking down; Aqualab water sampler; Kongsberg Simrad EM2000 swath bathymetry echosounder and an Edgetech chirp sub-bottom profiler.
Debrief/dissemination
Publications/web sites arising from project:
Dowdeswell, J.A., Evans, J., Mugford, R., Griffiths, G., McPhail, S., Millard, N., Stevenson, P., Brandon, M.A., Banks, C., Heywood, K.J. and Price, M.R., 2008. Autonomous underwater vehicles (AUVs) and investigations of the ice–ocean interface in Antarctic and Arctic waters. Journal of Glaciology, 54(187), pp.661-672.
Dodd, P.A., Price, M.R., Heywood, K.J. and Pebody, M., 2006. Collection of water samples from an autonomous underwater vehicle for tracer analysis. Journal of Atmospheric and Oceanic Technology, 23(12), pp.1759-1767.
Jones, D.O., Bett, B.J. and Tyler, P.A., 2007. Depth-related changes in the arctic epibenthic megafaunal assemblages of Kangerdlugssuaq, East Greenland. Marine Biology Research, 3(4), pp.191-204.
Details of the missions
M369
Start time/position 2-Sept-2004 17:59 68.2817N 32.1011W
End time/position 2-Sept-2004 18:14 68.2827N 32.1038W
Notes: Wings test, to cope with density change from 1016kg.m-3 at the surface to 1025kg.m-3 at depth. Failed to dive due to too slow a run-up on the surface. Prop blades broke on collision with ice on second attempt.
M370
Start time/position 3-Sept-2004 06:41 68.0416N 31.7707W
End time/position 3-Sept-2004 07:08 68.0421N 31.7753W
Notes: Drop weight dive to 15 m. Wings test, but buoyancy at depth too great for good control.
M371
Start time 3-Sept-2004 15:00 68.0839N 31.7965W
End time 3-Sept-2004 15:30 68.0843N 31.8003W
Notes: Wings test 3, with improved design; effective and control stable.
M372
Start time 3-Sept-2004 16:57 68.0839N 31.7965W
End time 3-Sept-2004 20:24 68.0837N 31.7923W
Notes: Wings and homing test; all well.
M373
Start time / position 4-Sept-2004 14:40 68.0833N 31.7908W
End time 4-Sept-2004 15:20
Notes: Vehicle crashed into the seabed of Courtauld Fjord due to faulty actuator connector.
M374
Start time / position 5-Sept-2004 13:24 68.4983N 32.1983W
End time 5-Sept-2004 15:01
Notes: Drop weight dive, with a survey pattern of increasing altitude. Many instances of imminent collision indicated, triggering early end of mission in difficult acoustic environment.
M375
Start time / position 5-Sept-2004 17:02 68.4983N 32.1983W
End time 5-Sept-2004 19:13
Notes: Sonar survey, but still plagued by collision avoidance triggers.
M376
Start time / position 8-Sept-2004 11:51 68.0700N 31.5666W
End time 8-Sept-2004 18:12
Notes: Kangerdlugssuaq Fjord mouth camera survey run at 10 m altitude. Seapam telemetry failed.
M377
Start time / position 8-Sept-2004 23:39 68.1260N 31.8563W
End time 9-Sept-2004 06:44
Notes: Kangerdlugssuaq Fjord mouth physical / chemical survey with a camera run. Completed,
but with some avoidance triggers on the camera (low altitude) run.
Lessons learned for future deployments
• Just how difficult it can be in such a coastal, ice infested environment for the AUV to interpret obstacle avoidance sonar data such that missions are safe, but early termination is avoided.
• The interpretation difficulties were compounded by difficult acoustic conditions, including: strong density gradients, lenses of fresher water, grounded icebergs and sheer rock faces.
• Obtaining undisturbed values of the surface density needed water samples from beyond the region of influence of flow around the ship. In practice, a bucket was swung 5 m from the ship on a crane. Surface salinity was 20, but 34 at depth.
• In this environment, shipboard low frequency swath (here an EM120 at 12kHz) did not have adequate resolution to map potential seabed hazards for the AUV.
• Good depth control and better false-target rejection is needed for consistent terrain following on low altitude camera missions.
Images from the cruise report or copied, with thanks, to G. Griffiths by the cruise participants

Autosub2 in Kangerdlugssuaq Fjord, East Greenland, surrounded by brash ice. Image courtesy A. Webb, NOC.
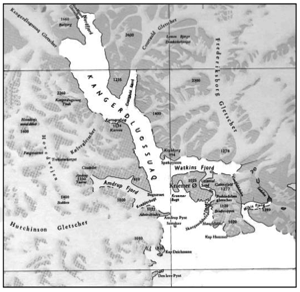
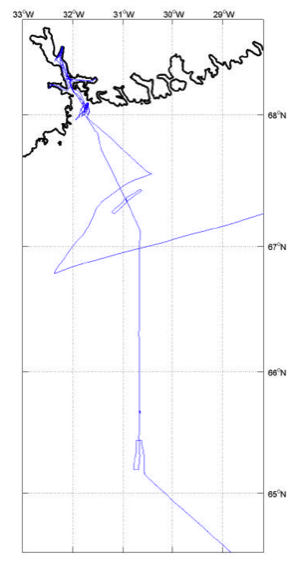
Detail map showing the arms of Kangerdlugssuaq Fjord, with Courtauld and Watkins Fjords and a track chart showing the ship positions within the fjords and for the Autosub2 observations on the continental shelf.
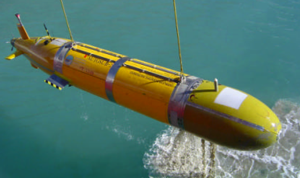
Short, stubby wings were added towards the stern of Autosub2 to improve stability in the difficult conditions encountered. The dive weight was also increased from 20kg to 30kg to ensure the vehicle was taken beneath the low salinity surface layer on its initial dive.