AUV Technology
Annotated list with links to reports or papers.

Homing and Guidance
Recent concepts, developments and practical experience
Vision-based docking of an AUV to an underway dock
While the motivation was not directly connected with the Polar Regions the concept of a vision-based terminal homing capability for a moving AUV to dock to an underway supported crewed or uncrewed surface vessel has been explored by Singh et al. (2020). Intended for final-stage guidance - the last 15 metres or so - the technique could be adapted for use from an ice camp on a moving ice flow. Based on a variant of the perspective n-point algorithm the dock has a ring of underwater LED lights, imaged by a camera on the AUV.
A convolutional neural network was trained to recognise over a thousand images of the LED configuration in air and in a tank at Dalhousie University. Comparison of human measured and automated vision-based position estimates in the tank showed a mean difference of 0.89 m with a standard deviation of 0.49 m and just over 1˚ in heading. The Nvidia Jetson TX2 embedded processor board was sufficient to run the deep learning algorithms at 6 frames per second.
Guidance for docking in a cluttered environment
The under ice environment can be challenging for acoustic guidance sensors given the presence of features such as ice keels or frazil ice. Although not motivated by applications in the Polar Regions, Yazdani et al. (2020) assess the feasibility of using the hp-adaptive Radau pseudospectral method for collision-free docking AUV operations in cluttered environments.
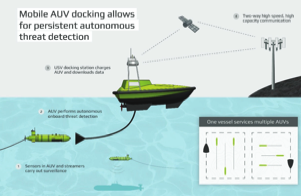
From Singh et al. (2020), this vision-based AUV terminal homing concept could be adapted for use from an ice camp on a drifting ice flow. Image courtesy ISE Ltd.