

Principal Investigator and Contacts
David Demer, Ph.D. (Co-PI)
Southwest Fisheries Science Center
8604 La Jolla Shores Drive
La Jolla, CA 92037
Mark R. Patterson, Ph.D. (Co-PI)
at the time of the expedition was at
School of Marine Science
Virginia Institute of Marine Science
College of William & Mary
Gloucester Point, Virginia 23062-1346
now at
Boston, Ma. 02115
Dates
1-9 February, 2005
Aim of project
The nearshore area around Cape Shirreff serves as the main feeding ground for the seasonally resident fur seal and penguin populations at Cape Shirreff. These animals feed primarily on Antarctic krill, which aggregates in large swarms and layers in the waters just offshore of the island. Shallow and highly variable bathymetry makes this area unsuitable for study from large ships. Using a specially modified 19-ft Zodiac (R/V Ernest II), the near-shore region was surveyed, collecting acoustical backscatter, hydrographic and meteorological data. Additionally, several instrumented buoys were deployed in the area. Also, an Autonomous Underwater Vehicle (AUV, Fetch I, Sias- Patterson) was deployed from a second zodiac several times during the nearshore survey as a field test for more extensive deployments in future field seasons. All of these data sets were analysed to study the relationships between the oceanography and biology of the nearshore area.
Funding Agency
NOAA/U.S. Antarctic Marine Living Resources Program and Virginia Institute for Marine Science (VIMS)
Details
Location: 62.5 S / -60.5 W Cape Shirreff, Livingston Island, Antarctica (NW of the peninsula)
Cruise plan/mission: The AUV was used to conduct feasibility studies in the nearshore region of Cape Shirreff including:
1. Use of side-scan sonar to survey epipelagic krill swarms.
2. Use of color video to document the natural orientation distributions of krill.
3. Use of side-scan sonar and an AUV to characterise possible avoidance reaction of krill to the survey vessels.
4. Use of a CTD and side-scan sonar to relate fine-scale physical oceanographic conditions to krill dispersion.
Length of mission(s): 55 dives to depths as great as 70 m; totalling an estimated 12.1 nm.
Operational Base: Research ship RV Yuzhmorgeologiya and support Zodiac RV Ernest.
Ice type: not applicable, open water during these missions.
Water depth: typically 50-200 m
Deployment/Recovery methods: It was necessary to develop a scheme for launch and recovery of the AUV from the 19’ Zodiac. Ultimately, this consisted of dead-lifting the vehicle onto the Zodiac pontoon while avoiding damage to the rear rudders and stabilisers, and then artfully sliding the vehicle backward into the water in such a way as to avoid deranging control surfaces.
Vehicle Specifications
AUV class/type: 1.96 m long, 73 kg / Fetch I
Navigation/positioning systems: GPS/DR
Obstacle avoidance: sidescan sonar (minimal)
Homing/guidance: acoustic pinger, radio modem link
Emergency measures: prescribed abort depth; spiral ascent
Parameters logged: 600 kHz side-scan sonar, color video camera, CTD with dissolved oxygen sensor, altimeter, and GPS.
Communications: 900 MHz radio modem, 38kHz and 50kHz fish tags for relocation if necessary.
Other equipment: 600 kHz side-scan sonar, color video camera, CTD with dissolved oxygen sensor, altimeter, and GPS.
Debrief/dissemination
Publications/web sites arising from project:
US Antarctic Marine Living Resources program Report for 2004/5, pages 112-123.
Details of the mission
For the first time ever, the nearshore waters of the Southern Ocean were surveyed by a small autonomous underwater vehicle. The Fetch I AUV from Sias-Patterson, Inc. was deployed from the ship, zodiac, and shore. AUV operations were commenced in the vicinity of Livingston Island, South Shetlands, on 1 February, with the last day of AUV operations on 9 February. The AUV dove 55 dives to depths as great as 70 m, and traveled an estimated 12.1 nm, while collecting 260 Mb of 600 kHz side scan sonar data, 4 hours of underwater video, and simultaneously logging conductivity, temperature, depth, bathymetry, and dissolved oxygen data at 2 Hz. AUV operations generally lasted 4 hours per day because of battery life limitations of the vehicle. AUV operations were conducted from the zodiac under varying conditions of rain, fog, high winds, and high waves.
Lessons learned for future deployments
The vehicle carried tags transmitting on 38 and 50 kHz, and locating the vehicle using the pinger locator proved essential on several occasions when visibility was reduced to 40 yards by fog, and when whitecaps rendered visual location problematic. It was also necessary to determine when the vehicle fins were knocked around during deployments, when the vehicle inadvertently hit the bottom in uncharted areas (the altimeter onboard cannot avoid collisions with vertical cliffs), and when marine algae had fouled the AUV’s propeller. It was also necessary to stay vigilant of leopard seals becoming overly interested in AUV operations and operators.
Images and the map are from the US Antarctic Marine Living Resources program Report for 2004/5, pages 112-123.
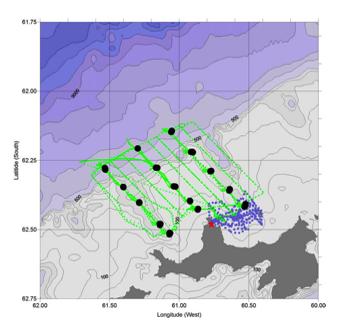
Map of the area surveyed by the Fetch I AUV during this project - the area with the small blue dots. The green live and black dots represent underway measurements and CTD stations from the main support ship, the RV Yuzhmorgeologiya.

Sias-Patterson Fetch I AUV off Livingston Island, South Shetland Islands, Antarctica, February 2005.


Support Zodiac RV Ernest moored at a protected beach north of Cape Shirreff, and the equipment in waterproof cases needed to collect and process the data being gathered.