AUV Technology
Annotated list with links to reports or papers.

Collision Avoidance
Recent concepts, developments and practical experience
Review of obstacle avoidance algorithms
Liu and Guo (2020) provide a useful review of real-time obstacle avoidance algorithms for AUVs. They recognise this area is a sub-set of what is needed for a practical avoidance system, which would need to include appropriate sensors, such as sonar, and 3D trajectory control capability. Progress with fuzzy logic, neural network and reinforcement learning algorithms is assessed, with a useful table of the advantages and disadvantages of each family of algorithms. Methods of implementing the algorithms are also covered. One area they highlight for further research is to combine knowledge of AUV motion characteristics into the obstacle avoidance algorithms.
Obstacle avoidance using Q-Learning guidance vector field
Wu et al. (2020) have tackled the 3D collision avoidance problem for an AUV, especially relevant in the Polar Regions, using a Q-Learning based guidance vector field. A "modulation matrix" quantifies the influence of an obstacle, which modifies the guidance vector field. In their simulations the Q-Learning algorithm found the shortest (not necessarily the path with fewest obstacles or lowest risk) toward the destination.
AUV navigation in confined spaces
Büscher and Bugard (2019) present thought provoking ideas on AUV navigation in confined spaces while avoiding obstacles, drawing on developments in general robotics. An interesting aspect is that they show that more information is available in a complex, multi-surface environment, the challenge is how best to acquire and make use of the information. One important message is not to treat the AUV as a "point in space" but to include its extensions, e.g. the characteristics such as maximum and minimum range, beam directions and angles of its sensors.
Collision avoidance within a metre of the underside of ice
Byun et al. (2021) have, perhaps unwittingly, revisited an idea from the 1930s for ensuring an underwater vehicle maintains a safe distance from the under side of sea ice. Taking their inspiration from articulated pantographs they have produced a novel design for an intervention AUV. It is specifically aimed at sampling and measurement under thin, relatively flat, young Antarctic ice. Their pantograph provides a constant contact with the ice undersurface Their paper provides
a proof-of-concept design and preliminary results of the pantograph with a prototype cylindrical vehicle with foldable actuation.
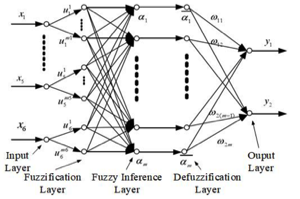
From Liu and Guo (2020), one example of collision avoidance algorithms in their review - a combination of fuzzy logic and a neural network.
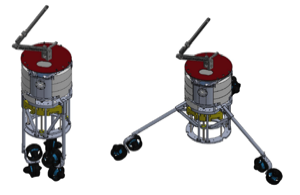
From a preprint of a paper by Byun et al. (2021), an early prototype for an articulated pantograph to keep the AUV in contact with the under surface of ice. Note that the concept is not completely novel, Sir Hubert Wilkins tried such a device on his submarine Nautilus in the Arctic in 1931. Image below from Under the North Pole by H. Wilkins.