

Principal Investigator and Contacts
Dr Keith Nicholls
British Antarctic Survey
High Cross
Madingley Road
Cambridge UK
E-mail kwni@bas.ac.uk
Tel: +44 1223 221400
Note: this information provided by G Griffiths, then at the National Oceanography Centre,
Southampton
Dates
3 February 2005 to 11 March 2005
Aim of project
The overall aim is to study the marine environment of floating ice shelves using a
combination of Autosub missions and conventional ship-based measurements. Three
projects were represented on this cruise:
• Physical oceanography studies using both ship-based observations over the
continental shelf seaward of the ice front, and data and water samples collected
from within the sub-ice shelf cavity by Autosub (Prof Karen Heywood and Dr
Keith Nicholls).
• To obtain data from the sea-ice margin of a shore-lead, primarily using Autosub-mounted
upward-looking swath and oceanographic sensors. Ideally, this would be
during an episode active polynya development: freezing conditions and offshore
winds (Prof. Peter Wadhams)
• To obtain ship-based photographic imagery of the sea floor, together with
imagery from beneath the ice shelf using a camera mounted on Autosub (Prof.
Paul Tyler).
Funding Agency
UK Natural Environment Research Council
Details
Location: Fimbulisen, Dronning Maud Land, Antarctica
Operational Base: Research ship RRS James Clark Ross.
Ice type: Floating ice shelf 200m thick.
Water depth: Between ~500 and ~1000m, depth increasing towards the grounded base of the ice shelf.
Deployment/Recovery methods: Dedicated launch and recovery gantry and servicing area on stern of the ship, comprising two modified 20’ shipping containers in an offset ‘T’ shape. Vehicle brought alongside on the starboard side by manoeuvring the ship; recovery float ‘popped’ by command, and lines deployed from the vehicle; grappled from the ship, and the vehicle ‘walked’ aft, around the starboard quarter and to the stern. Critical period is when lines/vehicle near the stern.
Vehicle Specifications
AUV class/type: Autosub2 – 6.8m long, 0.9m in diameter ~3000kg displacement. Endurance over 400km at 1.7 m/s. Diving depth to 1600m. Primary manganese alkaline battery ca. 60kWh. Dive weight
Navigation/positioning systems: GPS/DR, using Navstar IDAR GPS receiver and IXSEA PHINS fibre-optic gyrocompass, with downward looking RD Instruments 150 kHz ADCP in water-track mode, facility for using ‘bottom track’ on underside of ice from the upward-looking 300kHz RD Instruments ADCP.
Obstacle avoidance: Implemented using a forward-looking Simrad Mesotech 120kHz ‘altimeter’ and range information from the beams from the ADCP.
Emergency measures: Abort on over depth, on leak in any of the main pressure vessels, on mission over allocated time, on range of faults such as power loss, loss of internal network data communications. Abort drops a weight and vehicle rises to the surface.
Parameters logged: The full inventory of data and parameters logged is available on the BODC archive for this project. Also, the full cruise report pdf file can be downloaded.
Equipment: Two Sea-bird 911 CTDs, one each side of the vehicle nose; fluorometer for estimates of chlorophyll A; transmissometer; oxygen probe; RD Instruments 300 kHz ADCP looking up and an RD Instruments 150 kHz ADCP looking down; Aqualab water sampler; Kongsberg Simrad EM2000 swath bathymetry echosounder and an Edgetech chirp sub-bottom profiler.
Debrief/dissemination
Publications/web sites arising from project:
Nicholls, K. W., Abrahamsen, E. P., Buck, J. J. H., Dodd, P. A., Goldblatt, C., Griffiths, G., Heywood, K. J., Hughes, N. E., Kaletzky, A., Lane-Serff, G. F., McPhail, S. D., Millard, N. W., Oliver, K. I. C., Perrett, J., Price, M. R., Pudsey, C. J., Saw, K., Stansfield, K., Stott, M. J., Wadhams, P., Webb, A. T. and Wilkinson, J. P., Measurements beneath an Antarctic ice shelf using an autonomous underwater vehicle. Geophysical Research Letters, 33, 2006, doi:10.1029/2006GL025998.
Abrahamsen, E. et al. 2006. Circulation beneath Fimbulisen: Measurements and Modelling. AGU Fall Meeting 2006.
Abrahamsen, E. 2012 Oceanographic conditions beneath Fimbul Ice Shelf, Antarctica. PhD thesis, University of Southampton.
Nicholls, K.W., Abrahamsen, E.P., Heywood, K.J., Stansfield, K. and Østerhus, S., 2008. High‐latitude oceanography using the Autosub autonomous underwater vehicle. Limnology and Oceanography, 53 (part2), pp.2309-2320.
Price, M.R., Heywood, K.J. and Nicholls, K.W., 2008. Ice-shelf-ocean interactions at Fimbul Ice Shelf, Antarctica from oxygen isotope ratio measurements. Ocean Science, European Geosciences Union, 2008, 4 (1), pp.89-98. hal-00298357
Jones, D.O., Bett, B.J. and Tyler, P.A., 2007. Depth-related changes to density, diversity and structure of benthic megafaunal assemblages in the Fimbul ice shelf region, Weddell Sea, Antarctica. Polar Biology, 30(12), pp.1579-1592.
S. Perkins, Science News Online ‘Intrepid Explorer’ Vol. 170(5), 29 July 2006.
Project website at BODC
Details of the missions
Extracted and edited from the cruise report by Nicholls et al. and from a loss report by S.D. McPhail, National Oceanography Centre, Southampton.
M378
Start time/position 11-Feb-2005 11:50 70.0502S 1.5764W
End time/position 11-Feb-2005 13:15 69.9995S 1.5845W
Notes: High altitude control test mission, but a procedural mistake meant it ran at a constant 200 m altitude for one hour. 6 km
M379
Start time/position 11-Feb-2005 15:28 69.9903S 1.6175W
End time/position 11-Feb-2005 21:18 70.0017S 1.6026W
High altitude control test and homing system check. Control unstable as the ADCP range correction with attitude was not correct. Homing fine from 1000 to 300 m but then lost, poor geometry with the lowered beacon at 100 m depth suspected.
M380
Start time/position 11-Feb-2005 22:16 69.9962S 1.6217W
End time/position 12-Feb-2005 00:37 70.0011S 1.5946W
Further test of altitude control. Although better, excessive excursions in depth and pitch were present. Algorithm changed to use averaged ADCP data.
M381
Start time/position 12-Feb-2005 18:30 70.0016S 1.6007W
End time/position 12-Feb-2005 19:30 69.9996S 1.5996W
Altitude control at 350 and 450 m acceptable. 4.4 km
M382
Start time/position 13-Feb-2005 12:23 70.0503S 1.5036W
End time/position 13-Feb-2005 23:18 70.0472S 1.5617W
Notes: The first under ice shelf mission. After a dive weight assisted dive, Autosub circled its initial waypoint at an altitude of 200 m while checks via the acoustic telemetry
link showed that all systems and sensors were functioning correctly. An acoustic “Start” command was sent and Autosub proceeded under the Fimbul ice shelf. The transit in was in constant altitude mode at 150 m off the seabed. After some 25 km, Autosub turned back on a reciprocal track, at an altitude of 400 m. At a specified waypoint it descended to 300 m, and continued until it reached the recovery waypoint, which was set further away from the ice shelf, to allow for navigation errors. The reason for the change in altitude during the return, was an attempt to maximize the amount of time that the Autosub would be able to survey the underside of the ice shelf using the upward looking swath system.
The mission proceeded without problems. When recovered, the Autosub Navigation estimate had drifted 400m to the south west of the actual position. This drift, representing 0.8% of total distance traveled, was worse than anticipated (0.2%). The most likely explanation is that the drift was a result of the long-range bottom tracking during the return leg, giving larger errors than normal. A further problem noted was that the speed through the water, as measured using the upward looking ADCP was about 1.6% faster than the speed through the water measured suing the downward looking ADCP. The scale factor for the upward-looking ADCP was adjusted to correct for this. 59.8 km
M383
Start time/position 16-Feb-2005 07:33 70.0583S 1.5000W
Notes (edited from S.D. McPhail’s report): Mission 383 was planned to cover a similar distance under the ice shelf as Mission 382, but to perform a yo-yo profile inwards and travel out on a reciprocal course ‘terrain following’ at 80 m from the ice shelf. After circling the start waypoint, and, with all well, receiving the acoustic start command Autosub headed into the ice cavity at 100 m above the seabed for the first 2 km, and then switched to yo-yo profiling between 80 m off the seabed and 80 m from the ice shelf. Autosub’s emergency beacon normally chirps every 10 min, and was monitored for the first hour after launch, during which four emergency beacon chirps were received, confirming increasing range. The acoustic tracking system also showed the vehicle to be heading off in the correct direction and speed. Acoustic tracking (using the 10kHz transponders) ceased as expected at a range of 3 km. At 0828 the emergency beacon listening transducer was pulled inboard, freeing the ship for other science activities. The launch point was 2 km from the ice front, hence the vehicle was 2 km under the ice shelf when we ceased monitoring the emergency beacon. All seemed normal. At 1333 when the emergency beacon transmission was next monitored, 6 hours after the start of the mission, it was transmitting at 1 min interval, indicating an abort event had occurred. Ranging and triangulation using three positions of the arrival time of the beacon transmission indicated that the vehicle was at a position 70.1708S 1.1773W, a distance of 17.5 km from the start position and a perpendicular distance of 194 m SW of the intended track. More details are in the Loss Report.
Lessons learned for future deployments
Most of the problems encountered on this cruise have been covered in the Report of the Autosub Loss Inquiry Board chaired by Prof. J. Strut. The loss was caused by a technical systems failure. From the information available, this was equally likely to have been due to an abort command or a complete loss of power.
The Board recommended that steps should be taken to:
• Reduce probability of failure: risk can be reduced by making any event that might cause a loss of power or trigger an abort less probable. This goal will demand greater emphasis on designing for robustness and reliability and on developing screening tests to reveal faults before the start of a mission.
• Assess mission risk and AUV system reliability: It is suggested that numerical estimates be made of system reliability to focus design attention on the need to reduce risk to an acceptable level and to support design and mission operation decisions.
• Reduce the consequences: It is necessary to investigate the options for developing improved measures to enable the AUV to be retrieved or to “limp” home in the event of a failure under ice.
• Retrieve fault condition data: Information on the fault states of the system and the timing of failure events during a mission is important if the system developers are to learn from failure and develop corrective actions. The means of transmitting this information from a stranded AUV to the mother ship should be developed.
• Implement techniques for the identification and assessment of system technical risk. Typical good practice is to perform “design FMECA” and “process FMECA”
• Implement techniques to understand the level of system reliability achieved. Appropriate systems reliability tools include; reliability block diagrams/network analysis, fault tree analysis and event tree analysis.

Map of a part of Dronning Maud Land, Antarctica showing the location of the Fimbul Ice Shelf (south of South Africa) and the track of the RRS James Clark Ross in red.
Ice front of the Fimbul Ice Shelf from the wheelhouse top of the RRS James Clark Ross.
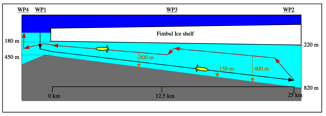
Schematic of the track taken by Autosub2 on its successful Mission 382 under the Fimbul Ice Shelf. The AUV tracked the seabed on the south-bound leg, turning at 25km and changing to follow the underside of the ice shelf on its return north.
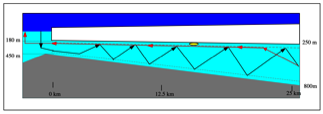
Schematic of the intended track of Autosub2 on Mission 383, the path being a 'yo-yo' to profile the water column properties between the seabed and the ice shelf. Triangulation from the ship of transmissions from the emergency beacon placed the stranded vehicle some 17.5km under the ice shelf. The triangulation was repeated six days later and showed a difference of only 250m from the original estimate, suggestion to the team that the vehicle had not moved.
Images and schematics from the cruise report.