

Principal Investigator and Contacts
Prof Adrian Jenkins
at the time of the expedition was at
British Antarctic Survey
High Cross
Madingley Road
Cambridge, UK
now at
Note: this information provided by G Griffiths, then at National Oceanography Centre, Southampton.
Dates
28 February 2003 to 4 April 2003
Aim of project
The aim of the AUV element of the project was:
1. To carry out Autosub missions beneath Pine Island Glacier or neighbouring glacier tongues, to establish the physical ocean environment and the morphology of the underside of the ice shelf and the seabed.
2. To study the multi-year sea ice that was expected to be present using upward sonar. In the event, ice conditions precluded the ship reaching Pine Island Bay to attempt AUV missions under the Glacier. Instead, work was done under sea ice.
Funding Agency
UK Natural Environment Research Council
Details
Location: Amundsen Sea, South East Pacific, Antarctica.
Operational Base: Research ship RRS James Clark Ross.
Ice type: A tongue of multi-year (~2m) sea ice was moving west from the area around Thurston Island (see map), leaving a corridor of ~40 miles between it and a line of icebergs streaming to the NW from the Thwaites Glacier Tongue. New ice was forming, being late in the season.
Water depth: ~500m when on the shelf, but over 1000 m in deep water, sufficient to prevent bottom-tracking even with the 150kHz RD Instruments ADCP/DVL.
Deployment/Recovery methods: Dedicated launch and recovery gantry on stern of the ship. Vehicle brought alongside on the starboard side by manoeuvring the ship; recovery float ‘popped’ by command, and lines deployed from the vehicle; grappled from the ship, and the vehicle ‘walked’ aft, round the starboard quarter and to the stern. Critical period was when the lines/vehicle were near the stern. The gantry was now part of a containerised vehicle deployment / servicing facility. This comprised two modified 20’ shipping containers in an offset ‘T’ shape, see photographs.
Vehicle Specifications
AUV class/type: Autosub2 class – 6.8m long, 0.9m in diameter ~3000kg displacement. Endurance over 400km at 1.7 m/s. Diving depth to 1600m. Primary manganese alkaline battery ca. 60kWh. Dive weight for rapid diving in ice-infested areas, triggered on a mechanical pressure release.
Navigation/positioning systems: GPS/DR, using Navstar IDAR (interrupted Data Acquisition) GPS receiver and IXSEA PHINS fibre-optic gyrocompass, with downward looking RD Instruments 150 kHz ADCP in water-track mode, facility for using 'bottom track’ on underside of ice from the upward-looking 300kHz RD Instruments ADCP.
Obstacle avoidance: Implemented using a forward-looking Simrad Mesotech 120kHz ‘altimeter’ and range information from the beams from the ADCP. Questions remained over the robustness in the software of false target handling from the sonars. This resulted in extreme (25˚) pitch values at times when the vehicle was being told to avoid imaginary obstacles that were sufficiently pervasive and persistent to not be rejected by the filtering algorithm.
Emergency measures: Abort on over depth, on leak in any of the main pressure vessels, on mission over allocated time, on range of faults such as power loss, or loss of internal network data communications. Abort drops a weight and vehicle rises to the surface.
Parameters logged: The full inventory of data and parameters logged is available on the BODC archive for this project . Also, the full cruise report pdf file is available.
Equipment: Two Sea-bird 911 CTDs, one each side of the vehicle nose; fluorometer for estimates of chlorophyll A; transmissometer; oxygen probe; RD Instruments 300 kHz ADCP looking up and an RD Instruments 150 kHz ADCP looking down; Aqualab water sampler; Kongsberg Simrad EM2000 swath bathymetry echosounder and an Edgetech chirp sub-bottom profiler.
Debrief/dissemination
Publications/web:
• Project website at BODC.
• Jenkins, A. et al., 2003. Oceanographic results at the Amundsen Sea shelf break, FRISP Report 15.
• Hayes, D.R., Jenkins, A. and McPhail, S., 2007. Autonomous underwater vehicle measurements of surface wave decay and directional spectra in the marginal sea ice zone. Journal of Physical Oceanography, 37(1), pp.71-83.
• Banks, C.J., 2007. Sea ice thickness and iceberg distributions in the Southern Ocean. PhD thesis, Open University.
• Robots in the deep, a news feature in Nature.
Details of the mission
Extracted and edited from the table by Nick Millard in the cruise report by Jenkins et al.
available via the BODC web site.
M307
Start time/position 3-March-2003 18:39 64.5410S 62.4964W
End time/position 3-March-2003 19:00 64.5332S 62.4755W
Notes: Gerlache Strait test. Swath down. Imprecise lat/long position produces stepped navigation, and TrackPoint II acoustic positioning system not working. 1.7 km
M308
Start time/position 3-March-2003 20:00 64.5376S 62.4476W
End time/position 3-March-2003 22:00 64.5367S 62.4842W
Notes: Gerlache Strait test. Swath down. Imprecise lat/long position produces stepped navigation, and TrackPoint II acoustic positioning system not working. 5.4 km
M309
Start time/position 4-March-2003 15:40 64.4967S 62.1157W
End time/position 4-March-2003 19:00 64.4362S 62.0428W
Notes: Gerlache Strait test. Swath down. Imprecise lat/long position produces stepped navigation. 13.1 km
M310
Start time/position 8-March-2003 14:11 70.4564S 102.1451W
End time/position 8-March-2003 16:32 70.4485S 101.9868W
Notes: Off Thurston Island. Swath up. Mostly a dive test, and TrackPoint II acoustic positioning system not working. Spiral dive no profiler, and swath data was garbage. 10.9 km
M311
Start time/position 9-March-2003 00:35 70.4730S 102.1678W
Notes: Off Thurston Island. Swath up. Swath data is available (only in central beams) but system still appeared to think that it was looking down and had added the AUV depth instead of subtracting it. Connector found corroded due to electrical leakage path. 8 km
M312
Start time/position 10-March-2003 20:24 70.4081S 100.6237W
End time/position 11-March-2003 00:25 70.4080S 100.6237W
Notes: Off Thurston Island. Swath up. Swath data is available but navigation was incorrect. Lots of broken line segments. Swath still thinking that it was looking down. Network failure leading to abort. 6.6 km
M313
Start time/position 13-March-2003 14:44 70.9095S 109.0894W
Notes: Continental shelf off Pine Island Bay. No swath or profiler. Network failure leading to abort. 6 km
M314
Start time/position 14-March-2003 00:39 71.0058S 109.2420W
End time/position 11-March-2003 03:10 70.0090S 109.2416W
Notes: Continental shelf off Pine Island Bay. Swath up data available. Looking up and understanding that it was looking up. Problems remain: for section at a reasonable depth most of the data was deleted, because it was above the sea surface (<0). Where the sub dived the range became constant and was not tracking the sea surface. No digital acoustic link and no radio link.
11.3 km
M315
Start time/position 15-March-2003 19:30 70.8914S 110.8251W
Notes: Continental shelf off Pine Island Bay. As for M314, also the beams appeared very non-perpendicular to the track.
M316
Start time/position 16-March-2003 15:42 71.2355S 113.1934W
Notes: Continental shelf off Pine Island Bay. Data drop-outs, indicating connector problems, else as M315.
M317
Start time/position 17-March-2003 21:05 71.2687S 113.9633W
End time/position 17-March-2003 23:46 71.2593S 113.9789W
Notes: Continental shelf off Pine Island Bay. Short section of swath up available. Looked good but data was being deleted where it was above the sea surface. 11 km
M318
Start time/position 18-March-2003 00:39 71.2956S 113.9696W
End time/position 18-March-2003 01:15 71.2925S 113.9717W
Notes: Continental shelf off Pine Island Bay. Square box of good data. Looking up and with a depth sensor offset of –5 m made sure the sea surface was accepted. Still with misalignment of beams to track on one leg. 3.1 km
M319
Start time/position 18-March-2003 16:01 71.6328S 113.2862W
End time/position 18-March-2003 17:26 71.6326S 113.2857W
Notes: Continental shelf off PIB. No swath. Collision with ship in bad weather giving rise to damaged nose panels. 35–40 kt winds and large pieces of ice. Profiler dead. No useable swath data because navigation was strange. 15.2 km
M320
Start time/position 20-March-2003 22:28 71.8873S 114.3011W
End time/position 20-March-2003 23:45 71.8894S 114.3258W
Notes: Continental shelf off Pine Island Bay. Swam into ice. No swath data, because the data did not have time messages. Apparently this was due to a new version of the control software being installed. 0.4 km
M321
Start time/position 22-March-2003 17:01 70.9759S 105.7388W
End time/position 22-March-2003 22:48 70.8328S 105.9318W
Notes: Sea ice zone off Thurston Island. Good data recorded on Swath, but timer set short. 28.4 km
M322
Start time/position 23-March-2003 17:43 70.5144S 102.5491W
End time/position 24-March-2003 02:53 70.2354S 102.3690W
Notes: Sea ice zone off Thurston Island. No data from swath, possibly due to reflection being above sea level. 57.1 km
M323
Start time/position 24-March-2003 16:28 70.5328S 100.7139W
End time/position 25-March-2003 01:30 70.5067S 100.7153W
Notes: In sea ice off Thurston Island. No data from swath. 44.8 km
M324
Start time/position 25-March-2003 14:59 70.4369S 98.5189W
End time/position 26-March-2003 05:48 70.3796S 98.2834W
Notes: In sea ice off Thurston Island. No data from swath. Strong current, and operating off the shelf, leading to position DR error of over 4 km making it a prolonged recovery. 72.9 km (a bad connector may have been to blame for lack of data on missions M322-M324).
Lessons learned for future deployments
Many of the problems encountered on this cruise have been covered in the paper by Griffiths et
al. presented at UUST in 2003 ‘Effect of upgrades on the reliability of the Autosub AUV ’.
• The cruise was dogged by connector problems causing sporadic power-line and data network interruptions at intermediate depths.
• Arranging for the EM2000 swath sounder to work properly in an ‘inverted’ mode to study sea ice was problematical.
• Attempting to bottom track drifting sea ice and use as the navigation input was not a good idea when in strong currents in deep water.
• The containerised launch and recovery system worked well.
• There is great value in science expeditions to the polar regions that do not rely 100% on an AUV working. The shipboard data collection from this cruise led to several papers.
Autosub workshop container, another, towards the stern, foring a 'T' housed the vehicle. The deployment gantry can just be seen to the right of the ship's gantry. This arrangement was in response to lessons learnt on the 2001 Weddell Sea cruise. Inside views of the two containers are shown below.
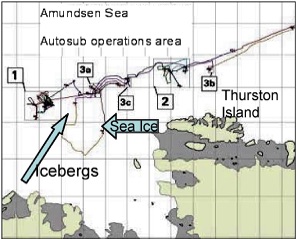
Map of the actual operating area in the Amundsen Sea. The original aim was to work under Pine Island Glacier, at the end of the bay at the bottom of the map, but sea ice and icebergs posed too much of a hazard.

Recovery from one of the trials missions in Gerlache Strait (M307-M309).


Deployment at the marginal ice zone of the Amundsen Sea.
Damage to the nose panels and aluminium space-frame structure during a collision with the ship on recovery at the end of Mission 319. Winds were 35-40kt with ice pieces being driven against the ship.
The team were well able to repair such damage and subsequent missions totalling over 100km were completed.



Images from the cruise report or copied, with thanks, to G. Griffiths by the cruise participants

Autosub2 with some fore and aft panels removed, during mobilisation at Stanley, Falkland Islands.